1. Einspurmodell : Bei der Herleitung des Einspurmodells wird das komplexe Fahrzeugsystem
durch eine Vereinfachungen auf nur wenige Gleichungen zurückgeführt.
Mit Hilfe dieses Modells lassen sich schnell die Aussagen über die Fahreigenschaften ableiten.
Das Fahrzeug wird auf eine mittlere Spur zusammengefasst, so dass die Achsen jeweils als eine Einheit betrachtet werden.
2. Nichtlineares Einspurmodell : Mit dem nichtlinearen Einspurmodell wird das Fahrzeug als Starrkörper
betrachtet, der sich ausschließlich horizontal bewegen kann.
3. Zweispurmodell : An allen vier Radaufstandspunkten wirken Längs- und Querkräfte, welche die horizontale Bewegung des Gesamtfahrzeugs beeinflussen.
4. Vierradmodell :
5. Mehrkörpersysteme :
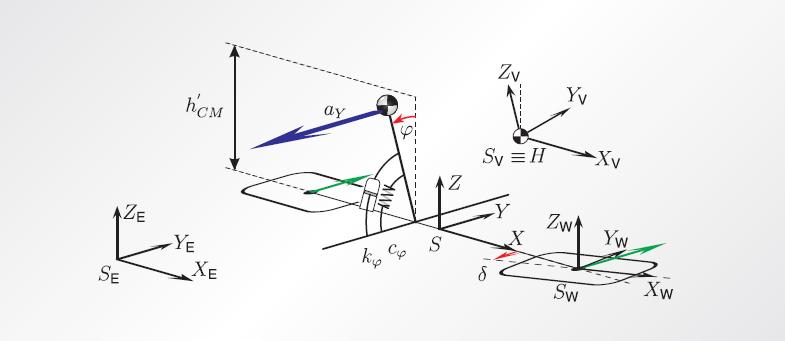
Prinzip und Koordinationsysteme des Einspurmodells
http://deposit.d-nb.de/cgi-bin/dokserv?idn=991708091&dok_var=d1&dok_ext=pdf&filename=9917080901.pdf
Das vereinfachte Modell zur Beschreibung der Wankbewegung beschreibt die reale Bewegung nur dann ausreichend genau ,wenn die wirkende Querbeschleunigung einen Grenzwert von etwa 4 m/s² nicht überschreitet.
Die Eigenfrequenz der Wankbewegung liegt je nach Beladung des Fahrzeugs zwischen 8-11 Hz.
Wenn alle genannten Effekte in der Modellbildung der Wankbewegung berücksichtigt werden,müsste die Beschreibung aller Details des Fahrwerks beinhalten.
Um die dynamische Wankbewegung des Fahrzeugs über den stabilen Bereich der Fahrdynamik hinweg abbilden zu können.
Zur Abbildung der Wankdynamik des Fahrzeugs wurde dieses Modell eingesetzt.
Die Wankwinkel und die Lenkwinkel der Vorder- Hinterräder werden als klein angenommen.
Die Trägheitskraft senkrecht zur Bewegungsgleichung wird als äußere Kraft im Schwerpunkt des Aufbaus angenommen.
Beim linearen Wankmodell werden Vorder- und Hinterachse zu einer Achse zusammengefasst.
Der Wankwinkel ist von der Querbeschleunigung abhängig.
Die Kräfte sind vorne & hinten zusammengefasst.
- Entstehung des Wankmoments beim Auslenken.
- Aktive Wankstabilisierung
-
In der Fahrwerkentwicklung liegt ein Schwerpunkt
Das Ziel wird verfolgt, um das Abstimmprozess zu begleiten.
Das Systemverständnis wird erhöht & der Aufwand der Abstimmung im Fahrzeug reduziert.
- Ich kann mein Fahrzeug- und Systemmodellierungsverständnis vertiefen.
- Einarbeitung der Literatur zur Fahrzeugmodellierung.
- Entwurf von Wankmodellen mit Berücksichtigung unterschiedlicher Modellierungstiefen.
In PKW werden fahrdynamische Reglersysteme eingesetzt,um dem Anspuch des Kunden nach Komfort ,Fahrsicherheit zu tragen.
Diese beeinflussen das Fahrzeug in längs-,quer- und vertikaldynamischer Richtung
Wankdynamik :
Wanken entsteht auf Grund von Krafteinwirkung am Schwerpunkt in Form von Querbeschleunigung (Fahrerinduziertes Wanken)
Wanken entsteht auf Grund von aerodynamischen Kräften mit der Komponente in y Richtung (aerodynamisches Wanken)
Querregler
Der Skyhook Regler sorgt für die Bedämpfung der Freiheitsgrade des Fahrzeugs Huben,Nicken und Wanken.
Die Querbeschleunigung wird mittels der Eingangssignale(Fahrgeschwindigkeit,Lenkwinkel,Querbeschleunigung,Gierrate) über ein Einspurmodell ermittelt
Das Wankmoment muss allerdings aufbereitet werden.
Fahrphysik : Längs-, Quer- und Vertikaldynamik
Fahrzeugmodelle: Fahrradmodell, Zweispurmodell, Viertelfahrzeugmodell, Wankmodell, Nickmodell
Wankverhalten (Roll Dynamics)
Fahrzeugquerdynamik