klassifikation von Eisenbahnweichen
Track segment
point or railroad crossing
bridge
Sonntag, 17. Juli 2011
Eisenbahnweiche (railroad switch)
Eisenbahnweiche ist der Übergang von einem Gleis auf ein anderes
Railroad switch --> mechanical installation is enabling the railway trains to be guided from one track to another at a railway junction.
Straßenbahnweichen --> Track switches
Befahrungsweisen --> traveled way
Gleiswechsel --> track change
rail track
Tracking of Rail Track
Detection of Switches
SIMULINK: a graphical synchronous data flow language
Data flows are synchronized based upon a unique global clock
Temporal loop in SIMULINK
EMBEDDED MATLAB : a high-level programming language
---------------------------------------------------------------
Autonomous Railway Vehicle
Automatic Slip Control for Railway Vehicles
slip process model of a railway vehicle
---------------------------------------------------------------
Control system for maximum use of adhesive forces of a railway
vehicle in a tractive mode
------------------------------------------------------------------------------------------------------------
http://www.sciencedirect.com/science?_ob=MImg&_imagekey=B6V2H-44XK3MM-1-19&_cdi=5703&_user=945281&_pii=S0967066102000084&_origin=article&_zone=related_art_hover&_coverDate=08%2F31%2F2002&_sk=999899991&view=c&wchp=dGLzVzb-zSkWl&md5=87ac89681ebcaee5e9f916ac46cd92cf&ie=/sdarticle.pdf
-------------------------------------------------------------------------------------------------------------
Railroad switch --> mechanical installation is enabling the railway trains to be guided from one track to another at a railway junction.
Straßenbahnweichen --> Track switches
Befahrungsweisen --> traveled way
Gleiswechsel --> track change
rail track
Tracking of Rail Track
Detection of Switches
SIMULINK: a graphical synchronous data flow language
Data flows are synchronized based upon a unique global clock
Temporal loop in SIMULINK
EMBEDDED MATLAB : a high-level programming language
---------------------------------------------------------------
Autonomous Railway Vehicle
Automatic Slip Control for Railway Vehicles
slip process model of a railway vehicle
---------------------------------------------------------------
Control system for maximum use of adhesive forces of a railway
vehicle in a tractive mode
------------------------------------------------------------------------------------------------------------
http://www.sciencedirect.com/science?_ob=MImg&_imagekey=B6V2H-44XK3MM-1-19&_cdi=5703&_user=945281&_pii=S0967066102000084&_origin=article&_zone=related_art_hover&_coverDate=08%2F31%2F2002&_sk=999899991&view=c&wchp=dGLzVzb-zSkWl&md5=87ac89681ebcaee5e9f916ac46cd92cf&ie=/sdarticle.pdf
-------------------------------------------------------------------------------------------------------------
Samstag, 9. April 2011
Die Einbindung der switches
userdata{1}.switch
switch{1}.ATTRIBUTE.id: 22
switch{1}.ATTRIBUTE.name:!!!
switch{1}.maintrack.ATTRIBUTE.id:28
switch{1}.maintrack.ATTRIBUTE.s: 50
switch{1}.maintrack.ATTRIBUTE.dir:+
switch{1}.maintrack.ATTRIBUTE.id:4
switch{1}.maintrack.ATTRIBUTE.s:0
switch{1}.maintrack.ATTRIBUTE.dir:+
switch{2}.ATTRIBUTE.id:23
switch{2}.ATTRIBUTE.name:!!!
switch{2}.maintrack.ATTRIBUTE.id:28
switch{2}.maintrack.ATTRIBUTE.s:177
switch{2}.maintrack.ATTRIBUTE.dir:+
switch{2}.maintrack.ATTRIBUTE.id:5
switch{2}.maintrack.ATTRIBUTE.s:0
switch{2}.maintrack.ATTRIBUTE.dir:+
switch{2}.sidetrack.ATTRIBUTE.id:5
switch{2}.sidetrack.ATTRIBUTE.s:0
switch{2}.sidetrack.ATTRIBUTE.dir:+
switch{3}.ATTRIBUTE.id:24
switch{3}.ATTRIBUTE.name:!!!
switch{3}.maintrack.ATTRIBUTE.id:28
switch{3}.maintrack.ATTRIBUTE.s:600
switch{3}.maintrack.ATTRIBUTE.dir:+
switch{3}.sidetrack.ATTRIBUTE.id:6
switch{3}.sidetrack.ATTRIBUTE.s:107
switch{3}.sidetrack.ATTRIBUTE.dir:-
switch{1}.ATTRIBUTE.id: 22
switch{1}.ATTRIBUTE.name:!!!
switch{1}.maintrack.ATTRIBUTE.id:28
switch{1}.maintrack.ATTRIBUTE.s: 50
switch{1}.maintrack.ATTRIBUTE.dir:+
switch{1}.maintrack.ATTRIBUTE.id:4
switch{1}.maintrack.ATTRIBUTE.s:0
switch{1}.maintrack.ATTRIBUTE.dir:+
switch{2}.ATTRIBUTE.id:23
switch{2}.ATTRIBUTE.name:!!!
switch{2}.maintrack.ATTRIBUTE.id:28
switch{2}.maintrack.ATTRIBUTE.s:177
switch{2}.maintrack.ATTRIBUTE.dir:+
switch{2}.maintrack.ATTRIBUTE.id:5
switch{2}.maintrack.ATTRIBUTE.s:0
switch{2}.maintrack.ATTRIBUTE.dir:+
switch{2}.sidetrack.ATTRIBUTE.id:5
switch{2}.sidetrack.ATTRIBUTE.s:0
switch{2}.sidetrack.ATTRIBUTE.dir:+
switch{3}.ATTRIBUTE.id:24
switch{3}.ATTRIBUTE.name:!!!
switch{3}.maintrack.ATTRIBUTE.id:28
switch{3}.maintrack.ATTRIBUTE.s:600
switch{3}.maintrack.ATTRIBUTE.dir:+
switch{3}.sidetrack.ATTRIBUTE.id:6
switch{3}.sidetrack.ATTRIBUTE.s:107
switch{3}.sidetrack.ATTRIBUTE.dir:-
Mittwoch, 30. März 2011
Montag, 28. März 2011
Embedded Matlab Function
for schleife bei embedded matlab function
http://www.gomatlab.de/for-schleife-bei-embedded-matlab-function-t11157.html
http://www.gomatlab.de/for-schleife-bei-embedded-matlab-function-t11157.html
Samstag, 26. März 2011
Höhere Technische Mechanik
- Träger ist bei A fest eingespannt und bei B durch eine Parallelführung abgestützt.
- Die Parallelführung lässt nur die Verschiebungen in vertikale Richtung zu.
Balkenquerschnitshöhe h
Biegesteifigkeit EI
Dehnsteifigkeit EA
Wärmeausdehnungskoeffizient alpha
- Der horizontale Balken wird auf der einen Seite um T erwärmt & auf der anderen Seite um T abgekühlt.
- Die Auflagerreaktionen bei A & B bestimmen.
- Der Momentenverlauf im Träger bestimmen.
- Die Verformungsbedingungen aufstellen.
- Zur Berechnung der statisch unbestimmten Größen:
- Die Auflagerreaktion und Momentenverlauf soll zur Vereinfachung gelten: a=2b , Der Träger ist dehnstarr,d.h. EA--> unendlich
- Die Parallelführung lässt nur die Verschiebungen in vertikale Richtung zu.
Balkenquerschnitshöhe h
Biegesteifigkeit EI
Dehnsteifigkeit EA
Wärmeausdehnungskoeffizient alpha
- Der horizontale Balken wird auf der einen Seite um T erwärmt & auf der anderen Seite um T abgekühlt.
- Die Auflagerreaktionen bei A & B bestimmen.
- Der Momentenverlauf im Träger bestimmen.
- Die Verformungsbedingungen aufstellen.
- Zur Berechnung der statisch unbestimmten Größen:
- Die Auflagerreaktion und Momentenverlauf soll zur Vereinfachung gelten: a=2b , Der Träger ist dehnstarr,d.h. EA--> unendlich
Donnerstag, 24. März 2011
Embedded Matlab Function
ich habe mich nur gewundert, wo die genzen Files herkommen.
ein Embedded MATLAB Function block arbeitet so: Der MATLAB code wird in C-Code übertragen und in eine mex-Datei compiliert.
4 types of User-defined Functions: S-Function, Fcn, Embedded MATLAB Function and MATLAB Fcn block
ein Embedded MATLAB Function block arbeitet so: Der MATLAB code wird in C-Code übertragen und in eine mex-Datei compiliert.
4 types of User-defined Functions: S-Function, Fcn, Embedded MATLAB Function and MATLAB Fcn block
Montag, 21. März 2011
Höhere Technische Mechanik/Festigkeitsberechnung
Höhere Technische Mechanik-Festigkeitsberechnung -- Higher Engineering Mechanics-Stess analysis
Festigkeitsberechnung (strength calculation) - Festigkeitslehre(strength of materials)
Links :
http://fam.uni-paderborn.de/Lehre/Aktuelles_Vorlesungsangebot_SS.html
Ankündigung
http://fam.uni-paderborn.de/Aktuelles/Ankuendigung_Klausur_TM3_HTM_ss_10.pdf
Prüfungsplan
http://www2.uni-paderborn.de/verwaltung/sachgebiete/3.2/mb/PruefPlan1011.htm
Die Aushänge im Schaukasten :
Höhere Technische Mechanik/Festigkeitsberechnung
Ziel:
Die Lehrveranstaltung vermittelt die Grundlagen zur effektiven Ermittlung der Beanspruchungen und der Verformungen von Tragwerken unter statischer und thermischer Belastung.
Inhalt:
1.Verformungen und Beanspruchungen von statisch bestimmt gelagerten Tragwerken unter statischer Belastung.
2. Verformungen und Beanspruchungen von einfach und mehrfach statisch unbestimmt gelagerten Tragwerken unter statischer Belastung.
3. Verformungen und Beanspruchungen von statisch bestimmt gelagerten Tragwerken unter thermischer Belastung.
4. Verformungen und Beanspruchungen von einfach und mehrfach statisch unbestimmt gelagerten Tragwerken unter thermischer Belastung.
Technische Mechanik 2:
Ziel:
Die Vorlesung vermittelt einen Überblick über die Methoden der Festigkeitslehre.
Das systematische Erarbeiten der Grundlagen und die Anwendung auf praktische Fragestellungen erlauben dem Hörer die selbständige Berechnung von Spannungen und Verformungen von statisch bestimmten und statisch unbestimmten Tragwerken und Maschinenteilen sowie die Berechnung von einfachen Stabilitätsproblemen.
Inhalt:
Spannungen ,Verzerrungen ,Stoffgesetz
Statisch bestimmte und statisch unbestimmte Stabsysteme
Biegung von Balken
Torsion von Tragwerken
Ebener Spannungs- und Verzerrungszustand
Knickung
Formänderungsarbeit ,elastische Energie
http://mitglied.multimania.de/solocan/tm1.pdf
http://www.hochschule-technik.de/pdf/85561_probe.pdf
http://mb.uni-paderborn.de/fileadmin/mb/dekanat/pdf/Studium/Raumplan_WS_2010_11-24_01_11.pdf
Die thermoelastische Spannungsanalyse -- the thermoelastic stress analysis
Mechanik: Kinematik (Lehre von den Bewegungen)
(Ursache-->Wirkung)(Drehgeschwindigkeit-->Geschwindigkeit)
Dynamik (Lehre von den Kräften)
(Ursache-->Wirkung)(Kraft--> Moment)
Statik(Lehre vom Geschwindigkeit der Kräfte)
Kinetik(Zusammenspiel Kräfte und Bewegungen)
Mechanik: starre Körper , Elastomechanik
Festigkeitsberechnung (strength calculation) - Festigkeitslehre(strength of materials)
Links :
http://fam.uni-paderborn.de/Lehre/Aktuelles_Vorlesungsangebot_SS.html
Ankündigung
http://fam.uni-paderborn.de/Aktuelles/Ankuendigung_Klausur_TM3_HTM_ss_10.pdf
Prüfungsplan
http://www2.uni-paderborn.de/verwaltung/sachgebiete/3.2/mb/PruefPlan1011.htm
Die Aushänge im Schaukasten :
Höhere Technische Mechanik/Festigkeitsberechnung
Ziel:
Die Lehrveranstaltung vermittelt die Grundlagen zur effektiven Ermittlung der Beanspruchungen und der Verformungen von Tragwerken unter statischer und thermischer Belastung.
Inhalt:
1.Verformungen und Beanspruchungen von statisch bestimmt gelagerten Tragwerken unter statischer Belastung.
2. Verformungen und Beanspruchungen von einfach und mehrfach statisch unbestimmt gelagerten Tragwerken unter statischer Belastung.
3. Verformungen und Beanspruchungen von statisch bestimmt gelagerten Tragwerken unter thermischer Belastung.
4. Verformungen und Beanspruchungen von einfach und mehrfach statisch unbestimmt gelagerten Tragwerken unter thermischer Belastung.
Technische Mechanik 2:
Ziel:
Die Vorlesung vermittelt einen Überblick über die Methoden der Festigkeitslehre.
Das systematische Erarbeiten der Grundlagen und die Anwendung auf praktische Fragestellungen erlauben dem Hörer die selbständige Berechnung von Spannungen und Verformungen von statisch bestimmten und statisch unbestimmten Tragwerken und Maschinenteilen sowie die Berechnung von einfachen Stabilitätsproblemen.
Inhalt:
Spannungen ,Verzerrungen ,Stoffgesetz
Statisch bestimmte und statisch unbestimmte Stabsysteme
Biegung von Balken
Torsion von Tragwerken
Ebener Spannungs- und Verzerrungszustand
Knickung
Formänderungsarbeit ,elastische Energie
http://mitglied.multimania.de/solocan/tm1.pdf
http://www.hochschule-technik.de/pdf/85561_probe.pdf
http://mb.uni-paderborn.de/fileadmin/mb/dekanat/pdf/Studium/Raumplan_WS_2010_11-24_01_11.pdf
Die thermoelastische Spannungsanalyse -- the thermoelastic stress analysis
Mechanik: Kinematik (Lehre von den Bewegungen)
(Ursache-->Wirkung)(Drehgeschwindigkeit-->Geschwindigkeit)
Dynamik (Lehre von den Kräften)
(Ursache-->Wirkung)(Kraft--> Moment)
Statik(Lehre vom Geschwindigkeit der Kräfte)
Kinetik(Zusammenspiel Kräfte und Bewegungen)
Mechanik: starre Körper , Elastomechanik
Samstag, 19. März 2011
Donnerstag, 17. März 2011
Bogenlänge Gleichseitiges Dreieck Gleichschenkliges Dreieck
Perpendicular bisector angle
half arc angle
arc angle range
center to mit point
http://www.mathopenref.com/bisectorperpendicular.html
Mehrere Werte 'from Workspace' einlesen ?
http://www.gomatlab.de/mehrere-werte-from-workspace-einlesen-t12879.html
half arc angle
arc angle range
center to mit point
http://www.mathopenref.com/bisectorperpendicular.html
Mehrere Werte 'from Workspace' einlesen ?
http://www.gomatlab.de/mehrere-werte-from-workspace-einlesen-t12879.html
Dienstag, 15. März 2011
xml_io_tools
Mit Jarek Tuszynski
xmlread Funktion wandelt Java-Objekten Baum in den Matlab-Datenstrukturen.
Die Datenstruktur erfolgt in Form des verschachtelten Strukturen und Zellen.
http://www.mathworks.com/matlabcentral/fx_files/12907/14/content/html/xml_tutorial_script.html
Simulink Report Generator
import .mat file to simulink
xmlread Funktion wandelt Java-Objekten Baum in den Matlab-Datenstrukturen.
Die Datenstruktur erfolgt in Form des verschachtelten Strukturen und Zellen.
http://www.mathworks.com/matlabcentral/fx_files/12907/14/content/html/xml_tutorial_script.html
Simulink Report Generator
import .mat file to simulink
Donnerstag, 10. März 2011
Mittwoch, 9. März 2011
wie kann ich .xml auf .mat datei umwandeln
- Renew saving the .mat file :
>>s=open('file.mat');
>>save('file.mat','-struct','s');
- XML Toolbox
MATLAB data structures of any level of nesting into an XML string.
http://www.mathworks.com/matlabcentral/fx_files/12907/14/content/html/xml_tutorial_script.html
problem with simulink .MAT file
Time values in file '.mat' must be monotonically non-decreasing.
Folgendes Problem :
Ich habe eine Tabelle - erste Spalte: Zeit - zweite Spalte: Leistung - dritte Spalte: Geschwindigkeit
Die Werte sollen als Eingangsgröße in mein Simulink Modell gehen.
Prinzipiell versuche ich die Daten mit einem "from File"-Block einzulesen. Hier bekomme ich allerdings die Fehlermeldung: "Timevalues must be monotonically nondecreasing", obwohl es sich um die gleichen Zeitwerte handelt, die bei dem "from Workspace"-Blog keine Probleme bereiten. (Komma wurde natürlich durch Punkt ausgetauscht - soweit alles klar...)
http://www.gomatlab.de/mehrere-werte-from-workspace-einlesen-t12879.html
Folgendes Problem:
Ich habe mir einen cell-Array im Workspace angelegt
Diesen Array möchte ich in einer S function weiterverwenden.
Über den Block From Workspace kann ich nicht auf den Array zugreifen.
Hat einer von euch eine Idee, wie ich dies anders umsetzen kann?
Ich empfehle dir eine struct zu nutzen,aber mit dem struct komme ich irgendwie nicht zu recht.
>>s=open('file.mat');
>>save('file.mat','-struct','s');
- XML Toolbox
MATLAB data structures of any level of nesting into an XML string.
http://www.mathworks.com/matlabcentral/fx_files/12907/14/content/html/xml_tutorial_script.html
problem with simulink .MAT file
Time values in file '.mat' must be monotonically non-decreasing.
Folgendes Problem :
Ich habe eine Tabelle - erste Spalte: Zeit - zweite Spalte: Leistung - dritte Spalte: Geschwindigkeit
Die Werte sollen als Eingangsgröße in mein Simulink Modell gehen.
Prinzipiell versuche ich die Daten mit einem "from File"-Block einzulesen. Hier bekomme ich allerdings die Fehlermeldung: "Timevalues must be monotonically nondecreasing", obwohl es sich um die gleichen Zeitwerte handelt, die bei dem "from Workspace"-Blog keine Probleme bereiten. (Komma wurde natürlich durch Punkt ausgetauscht - soweit alles klar...)
http://www.gomatlab.de/mehrere-werte-from-workspace-einlesen-t12879.html
Folgendes Problem:
Ich habe mir einen cell-Array im Workspace angelegt
Diesen Array möchte ich in einer S function weiterverwenden.
Über den Block From Workspace kann ich nicht auf den Array zugreifen.
Hat einer von euch eine Idee, wie ich dies anders umsetzen kann?
Ich empfehle dir eine struct zu nutzen,aber mit dem struct komme ich irgendwie nicht zu recht.
Dienstag, 8. März 2011
what is an S Function ?
- S-functions are compiled as MEX-files.
- MEX-files are dynamically linked into MATLAB when needed.
- S-functions can be used with the Real-Time Workshop.
- S Function can be implemented as either an M-file or a MEX file.
- S-Funktion (system function) ist die Beschreibung eines Simulink-Blockes in Matlab oder Maschinen-Code, wobei der Maschinen-Code aus C erzeugt werden kann und in Form eines MEX-Files vorliegen muss.
- Die Einbindung in Simulink-Prozesse erfordert auf Seiten der S-Funktionen eine spezielle Syntax.
http://groups.google.com/group/comp.soft-sys.matlab/browse_thread/thread/c2f37a6ab13c11db
http://alpha.fh-friedberg.de/iem/fileadmin/user_upload/kampschulte/ms1/ms1_VL11_Grafikanimation.pdf
http://www.esat.kuleuven.be/psi/spraak/courses/esatexpress/download/sfunctions.pdf
http://www.chem.mtu.edu/~tbco/cm416/MatlabTutorialPart5.pdf
- MEX-files are dynamically linked into MATLAB when needed.
- S-functions can be used with the Real-Time Workshop.
- S Function can be implemented as either an M-file or a MEX file.
- M-file S-Function
- MEX-File S-Function
- Direct feedthrough :
- Dynamically sized inputs
- Setting sample times and offset
- S-Funktion (system function) ist die Beschreibung eines Simulink-Blockes in Matlab oder Maschinen-Code, wobei der Maschinen-Code aus C erzeugt werden kann und in Form eines MEX-Files vorliegen muss.
- Die Einbindung in Simulink-Prozesse erfordert auf Seiten der S-Funktionen eine spezielle Syntax.
http://groups.google.com/group/comp.soft-sys.matlab/browse_thread/thread/c2f37a6ab13c11db
http://alpha.fh-friedberg.de/iem/fileadmin/user_upload/kampschulte/ms1/ms1_VL11_Grafikanimation.pdf
http://www.esat.kuleuven.be/psi/spraak/courses/esatexpress/download/sfunctions.pdf
http://www.chem.mtu.edu/~tbco/cm416/MatlabTutorialPart5.pdf
Sonntag, 27. Februar 2011
Global to Local Coordinate Transformation Matrix
T = trans_matrix_beam3d(x0,y0,z0,x1,y1,z1,alpha)
Die Funktion berechnet den Global to Local koordinieren Transformationsmatrix.
Die Funktion berechnet den Global to Local koordinieren Transformationsmatrix.
Samstag, 26. Februar 2011
coordinate transformation module
vehicle local coordinate system
kinematic unicycle state Model
[xi yi θi] Cartesian coordinate system
[vi ωi] the states of linear velocity and the angular velocity
the model equations from the global coordinates to the local coordinates
The Global Coordinates and Local Coordinates for Cyclic Pursuit Strategy
coordinate transformation module --> an Embedded MATLAB function
http://marhes.ece.unm.edu/index.php/Ysong:Project514#Introduction
Implementation of coordinate transformation with rotation around multiple axes
http://alexandria.tue.nl/repository/books/626941.pdf
Autonomous Vehicle Based on Simulink
http://www.springerlink.com/content/17817601t7836742/fulltext.pdf
Global and Local Coordinate Systems
Cartesian (X, Y, Z components)
Cylindrical (R, θ, Z components)
Spherical (R, θ, φ components)
Cylindrical (R, θ, Y components)
http://www.kxcad.net/ansys/ANSYS/ansyshelp/Hlp_G_MOD3_2.html
Global to Local Coordinate Transformation Matrix
http://www.mathworks.com/matlabcentral/fileexchange/9586-global-to-local-coordinate-transformation-matrix
modeling the vehicle environment
Road model
Test Track Design
Environment Model
global coordinate system of the environment
local coordinate system of the test track
transformation should be made to convert from one coordinate system to another.
Road model
1. coordinate transformation
2. transformation road properties
the global (x,y,z) and local (s,t) coordinate
Environment module block diagram
1. Road: Vertical Profile ,Horizontal Profile ,Transformation
2. scenario:
3. Traffic Participants
Transformation between the 2 coordinates (local road coordinate (s,t) ,global coordinates(x,y))
Modeling the test track profile
- Matlab M-functions
- Simulink basic components
- Automatically generated S-functions
- Manually written S-function
We found that the automatically generated S-function is the most suitable method because of its low
execution time.
Building S-Functions Automatically
S-Function Builder is a Simulink block that builds an S-function
open_system('sfcndemo_mixedm.mdl');
edit(fullfile(matlabroot,'simulink','src','mixedm.c'))
http://metalab.uniten.edu.my/~farrukh/mywork/s_fun1.pdf
How the S-Function Builder Builds an S-Function
kinematic unicycle state Model
[xi yi θi] Cartesian coordinate system
[vi ωi] the states of linear velocity and the angular velocity
the model equations from the global coordinates to the local coordinates
The Global Coordinates and Local Coordinates for Cyclic Pursuit Strategy
coordinate transformation module --> an Embedded MATLAB function
http://marhes.ece.unm.edu/index.php/Ysong:Project514#Introduction
Implementation of coordinate transformation with rotation around multiple axes
http://alexandria.tue.nl/repository/books/626941.pdf
Autonomous Vehicle Based on Simulink
http://www.springerlink.com/content/17817601t7836742/fulltext.pdf
Global and Local Coordinate Systems
Cartesian (X, Y, Z components)
Cylindrical (R, θ, Z components)
Spherical (R, θ, φ components)
Cylindrical (R, θ, Y components)
http://www.kxcad.net/ansys/ANSYS/ansyshelp/Hlp_G_MOD3_2.html
Global to Local Coordinate Transformation Matrix
http://www.mathworks.com/matlabcentral/fileexchange/9586-global-to-local-coordinate-transformation-matrix
modeling the vehicle environment
Road model
Test Track Design
Environment Model
global coordinate system of the environment
local coordinate system of the test track
transformation should be made to convert from one coordinate system to another.
Road model
1. coordinate transformation
2. transformation road properties
the global (x,y,z) and local (s,t) coordinate
Environment module block diagram
1. Road: Vertical Profile ,Horizontal Profile ,Transformation
2. scenario:
3. Traffic Participants
Transformation between the 2 coordinates (local road coordinate (s,t) ,global coordinates(x,y))
Modeling the test track profile
- Matlab M-functions
- Simulink basic components
- Automatically generated S-functions
- Manually written S-function
We found that the automatically generated S-function is the most suitable method because of its low
execution time.
Building S-Functions Automatically
S-Function Builder is a Simulink block that builds an S-function
open_system('sfcndemo_mixedm.mdl');
edit(fullfile(matlabroot,'simulink','src','mixedm.c'))
http://metalab.uniten.edu.my/~farrukh/mywork/s_fun1.pdf
How the S-Function Builder Builds an S-Function
Freitag, 25. Februar 2011
Converting .mat file to .xml file
Convert MAT file to XML file (.mat file contains a hierarchical structure).
The XML Toolbox converts MATLAB data structures of any level of nesting into an XML string.
xml_format()
xml_formatany()
xml_parse()
xml_parseany()
xml_load()
xml_save()
- converting .xml files to .mat files?
- How to convert XML data
- What Is an S-Function?
- S-function (system-function) , S-functions are compiled as MEX files using the mex utility
- When to Use an S-Function
- Creating new general purpose blocks
- Describing a system as a set of mathematical equations
The XML Toolbox converts MATLAB data structures of any level of nesting into an XML string.
xml_format()
xml_formatany()
xml_parse()
xml_parseany()
xml_load()
xml_save()
- converting .xml files to .mat files?
- How to convert XML data
- What Is an S-Function?
- S-function (system-function) , S-functions are compiled as MEX files using the mex utility
- When to Use an S-Function
- Creating new general purpose blocks
- Describing a system as a set of mathematical equations
Donnerstag, 24. Februar 2011
S-Function
The S-function demo library opens:
open_system([matlabroot,'/toolbox/simulink/simdemos/simfeatures/sfundemos.mdl']);
MATLAB S-Function Example:
1. Implement an S-function with an inherited sample time:
edit('msfcn_dsc.m');open_system('msfcndemo_sfundsc1.mdl');
2. Implement a continuous limited integrator where the output is bounded by lower and upper bounds and includes initial conditions.
edit('msfcn_limintm.m');open_system('msfcndemo_limintm.mdl');
3. Implement a multirate system
edit('msfcn_multirate.m');open_system('msfcndemo_multirate.mdl');
4. Implement an S-function that doubles its input
edit('msfcn_times_two.m');open_system('msfcndemo_timestwo.mdl');
5. Implement a unit delay
edit('msfcn_unit_delay.m');open_system('msfcndemo_sfundsc2.mdl');
6. Implement a variable pulse width generator by calling set_param from within a Level-2 MATLAB S-function. Also demonstrates how to use custom set and get methods for the block SimState.
edit('msfcn_varpulse.m');open_system('msfcndemo_varpulse.mdl');
7. Implement a variable sample time block in which the first input is delayed by an amount of time determined by the second input.
edit('msfcn_vs.m');open_system('msfcndemo_vsfunc.mdl');
Using S-function blocks in Simulink
http://www.chem.mtu.edu/~tbco/cm416/MatlabTutorialPart5.pdf
open_system([matlabroot,'/toolbox/simulink/simdemos/simfeatures/sfundemos.mdl']);
MATLAB S-Function Example:
1. Implement an S-function with an inherited sample time:
edit('msfcn_dsc.m');open_system('msfcndemo_sfundsc1.mdl');
2. Implement a continuous limited integrator where the output is bounded by lower and upper bounds and includes initial conditions.
edit('msfcn_limintm.m');open_system('msfcndemo_limintm.mdl');
3. Implement a multirate system
edit('msfcn_multirate.m');open_system('msfcndemo_multirate.mdl');
4. Implement an S-function that doubles its input
edit('msfcn_times_two.m');open_system('msfcndemo_timestwo.mdl');
5. Implement a unit delay
edit('msfcn_unit_delay.m');open_system('msfcndemo_sfundsc2.mdl');
6. Implement a variable pulse width generator by calling set_param from within a Level-2 MATLAB S-function. Also demonstrates how to use custom set and get methods for the block SimState.
edit('msfcn_varpulse.m');open_system('msfcndemo_varpulse.mdl');
7. Implement a variable sample time block in which the first input is delayed by an amount of time determined by the second input.
edit('msfcn_vs.m');open_system('msfcndemo_vsfunc.mdl');
Using S-function blocks in Simulink
http://www.chem.mtu.edu/~tbco/cm416/MatlabTutorialPart5.pdf
Mittwoch, 23. Februar 2011
Stabilität im Sinne von Lyapunov
Das Grundprinzip im Sinne vom Lyapunov,obwohl es keine Sprunganregung gibt,aber anhand die beliebige Anfangwerte für die Zustandvariablen ,so sterben die Zustandvariablen gegen Null,weil die gesamte Dynamik in den Zustandvariablen steckt.
Samstag, 19. Februar 2011
spurgeführter Omnibus
Struktur der Spurführungsregelung
Ein Omnibus soll einem Leitkabel geführt werden,das in der Straße verlegt ist.
Die Quarauslenkung ist elektronisch auszuregeln.
Single Track model:
Ein Omnibus soll einem Leitkabel geführt werden,das in der Straße verlegt ist.
Die Quarauslenkung ist elektronisch auszuregeln.
Single Track model:
To control the radius of steering maneuver, steering angles on front wheels are different.
This could be taken into account after the “middle wheel” steering angle assessment.
Montag, 14. Februar 2011
Dienstag, 8. Februar 2011
Einspurmodell mit Wankerweiterung
- Detection of Vehicle Rollover
http://delphi.com/pdf/techpapers/2004-01-1757.pdf
- Optimal Rollover Prevention with Steer by Wire and Differential Brakinghttp://www.crcarlson.com/Academia/Research/IMECE2003_41825.pdf
-Method for Determining the Center of Gravity for an Automotive Vehicle
http://www.freepatentsonline.com/20090024269.pdf
- Realtime Multiple-Model Estimation of Center of Gravity Position in Automotive Vehicles
http://eprints.nuim.ie/890/1/SolmazAkarShortenKalkkuhl_VSD2007_final.pdf
- Estimation of Passenger Vehicle _Internal Properties and their effect on stability and Handling
https://www.jurispro.com/uploadArticles/RWadeAllen.pdf
- evaluation of vehicle dynamic control for rollover prevention
http://www-personal.umich.edu/~hpeng/Evaluation%20of%20VDC.pdf
- Model-Based Design of a SUV anti-rollover control system
http://www.mkom13upi.com/files/2-2008-01-0579_Cherian_Final_1_10_08.pdf
- Roll-Over Prevention System for Commercial Vehicles
Additional Sensorless Function of the Electronic Brake System
http://pdfserve.informaworld.com/524050_751311367_714021279.pdf
- Roll Dynamics and Lateral Load Transfer Estimation in
Articulated Heavy Freight Vehicles: A Simulation Study
http://robo.fe.uni-lj.si/pdf_avi/Kamnik_rollover.pdf
Virtuelle Simulation von X-by-Wire Regelsystemen im Nutzfahrzeug mit Anwendung von Steer-by-Wire
http://www.femfat.com/ftp/papers/2005/07_CTI_Nutzfahrzeuge.pdf
Ein robustes Fahrdynamik-Regelungskonzept für die Kippvermeidung von Kraftfahrzeugen
http://tumb1.biblio.tu-muenchen.de/publ/diss/ei/2002/odenthal.pdf
- Robust steering control for active rollover avoidance of vehicles with elevated center of gravity.
http://www.google.de/url?sa=t&source=web&cd=2&ved=0CCwQFjAB&url=http%3A%2F%2Fciteseerx.ist.psu.edu%2Fviewdoc%2Fdownload%3Bjsessionid%3D7D691F28951B5E02FDFBB35AC46B16D7%3Fdoi%3D10.1.1.44.7571%26rep%3Drep1%26type%3Dps&rct=j&q=Robust%20steering%20control%20for%20active%20rollover%20avoidance%20of%20vehicles%20with%20elevated%20center%20of%20gravity.&ei=xmJRTZTdCJHEswbotOjiBg&usg=AFQjCNHLsygv7KKFftTdN-zjVoSUTlGX8Q&cad=rja
- A course in H∞ Control Theory
Präsentation
1.
http://www.google.de/url?sa=t&source=web&cd=3&ved=0CCsQFjAC&url=http%3A%2F%2Fwww-ee.ccny.cuny.edu%2Fwww%2Fweb%2Fjxiao%2Fmobot.ppt&rct=j&q=Linear%20bicycle%20model%20with%20roll%20degree%20of%20freedom%20.ppt&ei=PGVRTbyyCILzsgbY_dXZBg&usg=AFQjCNH-LxBlZWEZmCI89TkSKNaDT3FClA&cad=rja
2.
audiophile.tam.cornell.edu/~als93/SchwabMCDelft200312.ppt
3.
http://mechatronics.ece.usu.edu/ece5320/Schedule/hw01-2009/Eric%20Ruben-gyroscopes.ppt
4.
eople.msoe.edu/~pakkala/ME402/VehDyn_C8_Steering_2009_blank.ppt
5.
www.unece.org/trans/doc/2010/wp29grrf/AMEVSC-03-04e.ppt
6.
www.liu.se/vidi/filer/resources/1.171226/ivss2isarevised.ppt
http://delphi.com/pdf/techpapers/2004-01-1757.pdf
- Optimal Rollover Prevention with Steer by Wire and Differential Brakinghttp://www.crcarlson.com/Academia/Research/IMECE2003_41825.pdf
-Method for Determining the Center of Gravity for an Automotive Vehicle
http://www.freepatentsonline.com/20090024269.pdf
- Realtime Multiple-Model Estimation of Center of Gravity Position in Automotive Vehicles
http://eprints.nuim.ie/890/1/SolmazAkarShortenKalkkuhl_VSD2007_final.pdf
- Estimation of Passenger Vehicle _Internal Properties and their effect on stability and Handling
https://www.jurispro.com/uploadArticles/RWadeAllen.pdf
- evaluation of vehicle dynamic control for rollover prevention
http://www-personal.umich.edu/~hpeng/Evaluation%20of%20VDC.pdf
- Model-Based Design of a SUV anti-rollover control system
http://www.mkom13upi.com/files/2-2008-01-0579_Cherian_Final_1_10_08.pdf
- Roll-Over Prevention System for Commercial Vehicles
Additional Sensorless Function of the Electronic Brake System
http://pdfserve.informaworld.com/524050_751311367_714021279.pdf
- Roll Dynamics and Lateral Load Transfer Estimation in
Articulated Heavy Freight Vehicles: A Simulation Study
http://robo.fe.uni-lj.si/pdf_avi/Kamnik_rollover.pdf
Virtuelle Simulation von X-by-Wire Regelsystemen im Nutzfahrzeug mit Anwendung von Steer-by-Wire
http://www.femfat.com/ftp/papers/2005/07_CTI_Nutzfahrzeuge.pdf
Ein robustes Fahrdynamik-Regelungskonzept für die Kippvermeidung von Kraftfahrzeugen
http://tumb1.biblio.tu-muenchen.de/publ/diss/ei/2002/odenthal.pdf
- Robust steering control for active rollover avoidance of vehicles with elevated center of gravity.
http://www.google.de/url?sa=t&source=web&cd=2&ved=0CCwQFjAB&url=http%3A%2F%2Fciteseerx.ist.psu.edu%2Fviewdoc%2Fdownload%3Bjsessionid%3D7D691F28951B5E02FDFBB35AC46B16D7%3Fdoi%3D10.1.1.44.7571%26rep%3Drep1%26type%3Dps&rct=j&q=Robust%20steering%20control%20for%20active%20rollover%20avoidance%20of%20vehicles%20with%20elevated%20center%20of%20gravity.&ei=xmJRTZTdCJHEswbotOjiBg&usg=AFQjCNHLsygv7KKFftTdN-zjVoSUTlGX8Q&cad=rja
- A course in H∞ Control Theory
Präsentation
1.
http://www.google.de/url?sa=t&source=web&cd=3&ved=0CCsQFjAC&url=http%3A%2F%2Fwww-ee.ccny.cuny.edu%2Fwww%2Fweb%2Fjxiao%2Fmobot.ppt&rct=j&q=Linear%20bicycle%20model%20with%20roll%20degree%20of%20freedom%20.ppt&ei=PGVRTbyyCILzsgbY_dXZBg&usg=AFQjCNH-LxBlZWEZmCI89TkSKNaDT3FClA&cad=rja
2.
audiophile.tam.cornell.edu/~als93/SchwabMCDelft200312.ppt
3.
http://mechatronics.ece.usu.edu/ece5320/Schedule/hw01-2009/Eric%20Ruben-gyroscopes.ppt
4.
eople.msoe.edu/~pakkala/ME402/VehDyn_C8_Steering_2009_blank.ppt
5.
www.unece.org/trans/doc/2010/wp29grrf/AMEVSC-03-04e.ppt
6.
www.liu.se/vidi/filer/resources/1.171226/ivss2isarevised.ppt
Montag, 7. Februar 2011
Wankmodell
Modellierung der Wankdynamik
- Bei Kurvendurchfahrten oder andere Fahrzeuganrregungen können Wankbewegung auftreten.
- Um die Querabweichungsmessung über den Wankwinkel zu korrigieren.
- Das Wanken-- Drehung des Fahrzeugs um die Längsachse bei Kurvenfahrten.
- Das Fahrzeug neigt sich bei Kurvenfahrt um die Wanksachse ,so es die Wankbewegung entsteht.
- Bewegungsgleichung nach der Synthetisch (Euler-Newton) & Lagrange
- Wankwinkelgeschwindigkeit & Querbeschleunigung & Einspurmodell
- Zustandsgleichung der Querabweichungsbeschleungiung
http://elib.uni-stuttgart.de/opus/volltexte/2007/3344/pdf/Dissertation_2007_Kehl.pdf
- Querregelung f¨ur die Bahnfolge eines Versuchsfahrzeugs
- Fahrzeugmodellierung
- Kinematisches Fahrzeugmodell
- Dynamisches Fahrzeugmodell
- Für den modellbasierten Entwurf der Bahnfolgeregelung wird das Einspurmodell verwendet.
http://elib.uni-stuttgart.de/opus/volltexte/2007/3344/pdf/Dissertation_2007_Kehl.pdf
Kurvenfahrt
- Der Anlenkvorgang beim Einspurfahrzeug
Fahrzeugdynamik
http://www.autogumi.com/FDV_Skript.pdf
Durchführen von Fahrversuchen hinsichtlich einer Optimierung von Fahrdynamikfahrzeug
http://home.fhtw-berlin.de/~stedtnit/pdf/Diplomarbeit%20Sentuerk.pdf
Fahrzeug-Querdynamik
http://deposit.ddb.de/cgi-bin/dokserv?idn=979605016&dok_var=d1&dok_ext=pdf&filename=979605016.pdf
Ein Fahrdynamikmodell für die Beschreibung der Quer-, Gier- und
Wankdynamik von Fahrzeugen: Das Einspurmodell mit Wankerweiterung
http://tumb1.biblio.tu-muenchen.de/publ/diss/ei/2002/odenthal.pdf
Ein robustes Fahrdynamik-Regelungskonzept für die Kippvermeidung von Kraftfahrzeugen
Einspurmodell Ein vereinfachtesModell zur Beschreibung der horizontalen Fahrzeugbewegung stellt das Einspurmodell dar
http://tuprints.ulb.tu-darmstadt.de/902/1/Weber_Ingo_FZD_Diss.pdf
Einspurmodel
https://data.epo.org/publication-server/pdf-document?cc=EP&pn=0794885&ki=B1
http://beiker.org/Documents/Dissertation%20Beiker%202000.pdf
The single track vehicle model
http://www.tut.fi/plastics/tyreschool/moduulit/moduuli_10/hypertext/5/5_1.html
A Simulink model for vehicle rollover prediction and Prevention
http://web.ics.purdue.edu/~chiu2/research/thesis.pdf
Online Center of Gravity Estimation in Automotive
Vehicles using Multiple Models and Switching
http://www.hamilton.ie/selim/MM_Estimation_of_CG_Position_ICARCV06.pdf
- Bei Kurvendurchfahrten oder andere Fahrzeuganrregungen können Wankbewegung auftreten.
- Um die Querabweichungsmessung über den Wankwinkel zu korrigieren.
- Das Wanken-- Drehung des Fahrzeugs um die Längsachse bei Kurvenfahrten.
- Das Fahrzeug neigt sich bei Kurvenfahrt um die Wanksachse ,so es die Wankbewegung entsteht.
- Bewegungsgleichung nach der Synthetisch (Euler-Newton) & Lagrange
- Wankwinkelgeschwindigkeit & Querbeschleunigung & Einspurmodell
- Zustandsgleichung der Querabweichungsbeschleungiung
http://elib.uni-stuttgart.de/opus/volltexte/2007/3344/pdf/Dissertation_2007_Kehl.pdf
- Querregelung f¨ur die Bahnfolge eines Versuchsfahrzeugs
- Fahrzeugmodellierung
- Kinematisches Fahrzeugmodell
- Dynamisches Fahrzeugmodell
- Für den modellbasierten Entwurf der Bahnfolgeregelung wird das Einspurmodell verwendet.
http://elib.uni-stuttgart.de/opus/volltexte/2007/3344/pdf/Dissertation_2007_Kehl.pdf
Kurvenfahrt
- Der Anlenkvorgang beim Einspurfahrzeug
Fahrzeugdynamik
http://www.autogumi.com/FDV_Skript.pdf
Durchführen von Fahrversuchen hinsichtlich einer Optimierung von Fahrdynamikfahrzeug
http://home.fhtw-berlin.de/~stedtnit/pdf/Diplomarbeit%20Sentuerk.pdf
Fahrzeug-Querdynamik
http://deposit.ddb.de/cgi-bin/dokserv?idn=979605016&dok_var=d1&dok_ext=pdf&filename=979605016.pdf
Ein Fahrdynamikmodell für die Beschreibung der Quer-, Gier- und
Wankdynamik von Fahrzeugen: Das Einspurmodell mit Wankerweiterung
http://tumb1.biblio.tu-muenchen.de/publ/diss/ei/2002/odenthal.pdf
Ein robustes Fahrdynamik-Regelungskonzept für die Kippvermeidung von Kraftfahrzeugen
Einspurmodell Ein vereinfachtesModell zur Beschreibung der horizontalen Fahrzeugbewegung stellt das Einspurmodell dar
http://tuprints.ulb.tu-darmstadt.de/902/1/Weber_Ingo_FZD_Diss.pdf
Einspurmodel
https://data.epo.org/publication-server/pdf-document?cc=EP&pn=0794885&ki=B1
http://beiker.org/Documents/Dissertation%20Beiker%202000.pdf
The single track vehicle model
http://www.tut.fi/plastics/tyreschool/moduulit/moduuli_10/hypertext/5/5_1.html
A Simulink model for vehicle rollover prediction and Prevention
http://web.ics.purdue.edu/~chiu2/research/thesis.pdf
Online Center of Gravity Estimation in Automotive
Vehicles using Multiple Models and Switching
http://www.hamilton.ie/selim/MM_Estimation_of_CG_Position_ICARCV06.pdf
Sonntag, 6. Februar 2011
Railcab Teststrecke
- Eine Teststrecke von ca. 530 m mit Geraden- und Kurvenabschnitten
http://deposit.ddb.de/cgi-bin/dokserv?idn=983618445&dok_var=d1&dok_ext=pdf&filename=983618445.pdf
- Strukturierte Entwicklung der Informationsverarbeitung für die aktive Federung eines Schienenfahrzeugs.
-
http://deposit.ddb.de/cgi-bin/dokserv?idn=983618445&dok_var=d1&dok_ext=pdf&filename=983618445.pdf
- Strukturierte Entwicklung der Informationsverarbeitung für die aktive Federung eines Schienenfahrzeugs.
-
Klothoide -- clothoide -- Euler spiral
- Die Klothoide(Spinnlinie) ist eine Kurve, deren Krümmung linear zu ihrer Bogenlänge zunimmt.
http://www.math.hmc.edu/~gu/curves_and_surfaces/curves/clothoid.html
- how to draw clothoid in matlab between known points?
>>dt = .01 ;
>>t=(-2*pi):dt:(2*pi) ;
>>x = cumtrapz(sin(t.^2)) * dt ;
>>y = cumtrapz(cos(t.^2)) * dt ;
>>plot(x,y,'b-') ;
- the clothoid (cornu) curve has the characteristic that its curvature is proportional to
arclength along the curve as measured from the clothoid's origin.
- Klothoide- Cornu-Spirale
- Die Klothoide wird als Übergangsbogen bei Kurven im Straßenbau und im Eisenbahnbau eingesetzt.
- Klothoidengleichung :
- Der Krümmungsradius dieser Kurve ist umgekehrt proportional zur Länge des Bogens:
http://scholar.lib.vt.edu/theses/available/etd-07312007-160005/unrestricted/Thesis_final.pdf
- Euler spiral is a curve whose curvature changes linearly with its curve length.
- Euler spirals are also commonly referred to as (spiros), (clothoids) or (Cornu spirals).
- The Clothoid is also called Euler spiral and Spiral of Cornu, is a curve whose curvature is equal to its arclength. It has the parametric formula:
- the Integrand sin(x²/2) , Integral(0,t)sin(x²/2)dx
http://xahlee.org/SpecialPlaneCurves_dir/Clothoid_dir/clothoid.pdf
http://xahlee.org/SpecialPlaneCurves_dir/specialPlaneCurves.html
-----------------------------------------------------------------------------------------------------------------
Clothoid Loop -- Circular Loop
http://ffden-2.phys.uaf.edu/211_fall2002.web.dir/shawna_sastamoinen/Clothoid_Loop.htm
What is a spiral?
A spiral is a curve ,which runs around a center in a special way.
----------------------------------------------------------------------------------------------------------------
The clothoid (double spiral) is a curve, whose curvature grows with the distance from the origin.
The radius of curvature is opposite proportional to its arc measured from the origin.
----------------------------------------------------------------------------------------------------------------
- Teststrecken, werden aus den Elementen aufgebaut : Gerade,Klothoide und Kurve.
1.Gerade – 2.Klothoide – 3.Kreis – 4.Klothoide – 5.Kreis – 6.Klothoide – 7.Gerade
- Der Krümmungsverlauf über die Strecke
- Klothoidenmodell & Einspurmodell
- Klothoiden-Bahnkurve
- Das Klothoidenmodell beschreibt das Krümmungsverlauf im Straßenbau .
-
http://www.math.hmc.edu/~gu/curves_and_surfaces/curves/clothoid.html
- how to draw clothoid in matlab between known points?
>>dt = .01 ;
>>t=(-2*pi):dt:(2*pi) ;
>>x = cumtrapz(sin(t.^2)) * dt ;
>>y = cumtrapz(cos(t.^2)) * dt ;
>>plot(x,y,'b-') ;
- the clothoid (cornu) curve has the characteristic that its curvature is proportional to
arclength along the curve as measured from the clothoid's origin.
- Klothoide- Cornu-Spirale
- Die Klothoide wird als Übergangsbogen bei Kurven im Straßenbau und im Eisenbahnbau eingesetzt.
- Klothoidengleichung :
- Der Krümmungsradius dieser Kurve ist umgekehrt proportional zur Länge des Bogens:
http://scholar.lib.vt.edu/theses/available/etd-07312007-160005/unrestricted/Thesis_final.pdf
- Euler spiral is a curve whose curvature changes linearly with its curve length.
- Euler spirals are also commonly referred to as (spiros), (clothoids) or (Cornu spirals).
- The Clothoid is also called Euler spiral and Spiral of Cornu, is a curve whose curvature is equal to its arclength. It has the parametric formula:
- the Integrand sin(x²/2) , Integral(0,t)sin(x²/2)dx
http://xahlee.org/SpecialPlaneCurves_dir/Clothoid_dir/clothoid.pdf
http://xahlee.org/SpecialPlaneCurves_dir/specialPlaneCurves.html
-----------------------------------------------------------------------------------------------------------------
Clothoid Loop -- Circular Loop
http://ffden-2.phys.uaf.edu/211_fall2002.web.dir/shawna_sastamoinen/Clothoid_Loop.htm
What is a spiral?
A spiral is a curve ,which runs around a center in a special way.
----------------------------------------------------------------------------------------------------------------
The clothoid (double spiral) is a curve, whose curvature grows with the distance from the origin.
The radius of curvature is opposite proportional to its arc measured from the origin.
----------------------------------------------------------------------------------------------------------------
- Teststrecken, werden aus den Elementen aufgebaut : Gerade,Klothoide und Kurve.
1.Gerade – 2.Klothoide – 3.Kreis – 4.Klothoide – 5.Kreis – 6.Klothoide – 7.Gerade
- Der Krümmungsverlauf über die Strecke
- Klothoidenmodell & Einspurmodell
- Klothoiden-Bahnkurve
- Das Klothoidenmodell beschreibt das Krümmungsverlauf im Straßenbau .
-
Montag, 31. Januar 2011
ITI Vehicle Dynamics
1. Enviroment model :
- Test Track (vehicle environment)
- global coordinate System of the whole environment(x,y) & local road coordinate system of the test track(s,t).
- modelling of the test track profile
- Test Track (vehicle environment)
- global coordinate System of the whole environment(x,y) & local road coordinate system of the test track(s,t).
- modelling of the test track profile
- Road Model :
- Transformation block : Input(s,t) output(x,y)
- Road properties block : Input(x,y) output(z,Friction)
- Yaw Angle Block : Input(x,y) output( yaw angle)
- Driver Model
- Pedestrain movement controller
- Scenario manager
- Force transformation
- Force of mass :Input(road inclination angle, yaw angle) Output (force of mass in x,y,z)
- Force of aerodynamics : Input(velocity,slip angle) Output(aerodynamics force )
- Angular momentum : Input(velocity,slip angle,radius of rotation) Output(angular momentum in x.y)
- Force in X Direction : Input(force in x wheel,force in x from mass,angular momentum , force in air) Output( force on CG in x)
- Force in Y Direction : Input(force in y wheel,force in mass y,angular momentum in y),Output(force acting on CG)
- Force in Z Direction : Input(force in z wheel,force in mass z,angular momentum in z),Output(force acting on CG)
- Moment X axis : Input(force in z wheel,y wheel,hight front left,front right, rear left ,rear right) Output ( moment x axis)
- Moment Y axis : Input(force in z wheel,x wheel,hight front left,front right, rear left ,rear right) Output ( moment y axis)
- Steering (Ackermann) : Input(steering angle) ,( Angle front left, front right),(Ackermann radius)
- Horizontal vehicle dynamics :
- Vertical vehicle dynamics :
Modellbildung & Simulation der Dynamik von Kraftfahrzeug
- Fahrzeugdynamik : Lenkung ,Radaufhängen,Bremsen,Räder,Antriebstrang
- Das klassische lineare Einspurmodell ( Riekert & Schunk 1940)
- Das Fahrzeug bewegt sich auf einer Kreisbahn um den Krümmungskreismittelpunkt
-
- Das klassische lineare Einspurmodell ( Riekert & Schunk 1940)
- Das Fahrzeug bewegt sich auf einer Kreisbahn um den Krümmungskreismittelpunkt
-
Klothoide Kurven
- Klothoide Kurv wird als Übergangsbogen bei Kurven im Straßenbau und im Eisenbahnbau eingesetzt.
- Kann man mit Matlab oder Simulink Klothoiden oder andere S-Kurven berechnen?
-
- Kann man mit Matlab oder Simulink Klothoiden oder andere S-Kurven berechnen?
-
Querdynamikregelung
Querdynamikregelung
1. Brüdigam (1994) Reglertyp(Zustandsregler mit Polvorgabe)
2. Hessburg (1994) Reglertyp(Fuzzy)
3. Byrne (1998) Reglertyp (H Regler)
4. Guldner(1999) Reglertyp(PDT1)
5. Taylor(1999) Reglertyp(PDT2)
6. Chol (2000) Reglertyp(Adaptiver Regler)
7. Maurer(2000) Reglertyp(Zustandsregler mit Polvorgabe)
8. Söhnitz(2001) Reglertyp(H2-Regler)
9. Tan (2002) Reglertyp(PDT2 mit virtueller Vorschau)
10.Rothfuß(1997) Reglertyp(flachheitsbasiert)
Einspurmodell
1. Die Räder einer Achse werden zu einem Rad zusammengefasst.
2. Schwerpunkt des Fahrzeugs in Fahrbahnhöhe
3. Vernächlässigung von Wank- und Nickbewegung
4. Linearisierung des Systems bei kleinen Querbeschleunigungen
----------------------------------------------------------------------------
Einspurmodell
1. Einspurmodell
2. Spurwechselmanöver
aktive Radaufhängung
Die Regelungsaufgabe : Skyhook , Groundhookstrategie
Fahrdynamikregelung : ESP
Fahrzeugmodell : Einspurmodell
http://etit.tuwien.ac.at/fileadmin/ETIT/Downloads/350000/Automatisierungstechnik_Kugi.pdf
1. Brüdigam (1994) Reglertyp(Zustandsregler mit Polvorgabe)
2. Hessburg (1994) Reglertyp(Fuzzy)
3. Byrne (1998) Reglertyp (H Regler)
4. Guldner(1999) Reglertyp(PDT1)
5. Taylor(1999) Reglertyp(PDT2)
6. Chol (2000) Reglertyp(Adaptiver Regler)
7. Maurer(2000) Reglertyp(Zustandsregler mit Polvorgabe)
8. Söhnitz(2001) Reglertyp(H2-Regler)
9. Tan (2002) Reglertyp(PDT2 mit virtueller Vorschau)
10.Rothfuß(1997) Reglertyp(flachheitsbasiert)
Einspurmodell
1. Die Räder einer Achse werden zu einem Rad zusammengefasst.
2. Schwerpunkt des Fahrzeugs in Fahrbahnhöhe
3. Vernächlässigung von Wank- und Nickbewegung
4. Linearisierung des Systems bei kleinen Querbeschleunigungen
----------------------------------------------------------------------------
Einspurmodell
1. Einspurmodell
2. Spurwechselmanöver
aktive Radaufhängung
Die Regelungsaufgabe : Skyhook , Groundhookstrategie
Fahrdynamikregelung : ESP
Fahrzeugmodell : Einspurmodell
http://etit.tuwien.ac.at/fileadmin/ETIT/Downloads/350000/Automatisierungstechnik_Kugi.pdf
Einspurmodell -wikipedia
- Das lineare Einspurmodell mit 2 Freiheitsgraden ist Modellvorstellung zur Erklärung der Querdynamik.
- Das Einspurmodell wurde von Riekert und Schunck bereits 1940 entwickelt.
- Das querdynamische Verhalten kann im Bereich von 4 m/s2 als Querbeschleungiung durch das
lineare Einspurmodell näherungsweise erklärt werden.
- Das lineare Einspurmodell , nichtlineare Einspurmodelle oder Einspurmodelle mit
zusätzlichem Wankfreiheitsgrad.
http://de.wikipedia.org/wiki/Benutzer:Wruedt/Einspurmodell
- Ahnnahmen beim Einspurmodell
- Das querdynmaische Verhalten können über lineare Einspurmodell gewonnen werden.
- Das Fahrzeug besitzt die Gierbewegung als rotatorische Freiheitgrad.
Sicherheits- und komfortsysteme:
http://books.google.de/books?id=rAeXUA6GfeQC&pg=PA123&lpg=PA123&dq=Einspurmodell+mit+Wanken&source=bl&ots=xVkTG6Em4n&sig=tABQdi38y12uKXS0nl7Lh6ZEQoo&hl=de&ei=v85GTc-cF8uKswaq5P3QDg&sa=X&oi=book_result&ct=result&resnum=1&ved=0CBcQ6AEwADgK#v=onepage&q=Einspurmodell%20mit%20Wanken&f=false
- Das Einspurmodell wurde von Riekert und Schunck bereits 1940 entwickelt.
- Das querdynamische Verhalten kann im Bereich von 4 m/s2 als Querbeschleungiung durch das
lineare Einspurmodell näherungsweise erklärt werden.
- Das lineare Einspurmodell , nichtlineare Einspurmodelle oder Einspurmodelle mit
zusätzlichem Wankfreiheitsgrad.
http://de.wikipedia.org/wiki/Benutzer:Wruedt/Einspurmodell
- Ahnnahmen beim Einspurmodell
- Das querdynmaische Verhalten können über lineare Einspurmodell gewonnen werden.
- Das Fahrzeug besitzt die Gierbewegung als rotatorische Freiheitgrad.
Sicherheits- und komfortsysteme:
http://books.google.de/books?id=rAeXUA6GfeQC&pg=PA123&lpg=PA123&dq=Einspurmodell+mit+Wanken&source=bl&ots=xVkTG6Em4n&sig=tABQdi38y12uKXS0nl7Lh6ZEQoo&hl=de&ei=v85GTc-cF8uKswaq5P3QDg&sa=X&oi=book_result&ct=result&resnum=1&ved=0CBcQ6AEwADgK#v=onepage&q=Einspurmodell%20mit%20Wanken&f=false
Modellbildung der Fahzeug-Querdynamik
1. Das Einspurmodell mit Wanken.
2. Das klassische Einspurmodell.
3. Das vereinfachte Einspurmodell mit Wanken.
- Die Fahrzeugmodelle können unter 2 Aspekten klassifizieren:
1. Die Anzahl der relativ zueinander Massen in Einspurmodelle und Mehrkörpermodelle.
------------------------------------------------------------------------------------------------------------
1. vereinfachte Modelle der Fahrzeugquerdynamik
- Das Fahrzeugmodell wird um die wankende Masse erweitert.
- ein körperfestes Koordinatensystem soll verwendet werden.
- Aufbau : wankende Masse , Fahrgestell : nicht wankende Masse
-------------------------------------------------------------------------------------------------------------
- Die Bewegungsgleichungen für die Querdynamik : Kraftbilanz in y Richtung , Momentbilanz um die z-Achse und x-Achse.
-
2. Das klassische Einspurmodell.
3. Das vereinfachte Einspurmodell mit Wanken.
- Die Fahrzeugmodelle können unter 2 Aspekten klassifizieren:
1. Die Anzahl der relativ zueinander Massen in Einspurmodelle und Mehrkörpermodelle.
- Beim Einkörpermodell wird das Fahrzeug als ein starrer Körper modelliert.
- Beim Mehrkörpermodell werden Aufbau,Achsen,Räder als starre Körper betrachtet,die relativ zueinander beweglich sind und gegenseitig Kräfte aufeinander ausüben.
- Das Einspurmodell mit Wanken (2 Körper Modell) besteht aus Fahrgestell und wankendem Aufbau.
- statische Modelle : Die Zustandgrößen sind Konstant
- dynamische Modelle : Die Zustandgrößen ändern sich dynamisch
- Kinematik : beschreibt das geometrische Bewegungsverhältnis der Körper in Abhängigkeit von der Zeit,ohne nach den verursachenden Kräften zu fragen.
- Einkörpersystem ( starrer Körper)
- Kräftebilanzen
- Momentenbilanzen
- Lage im Raum (Eulerwinkel)
- Mehrkörpersystem ( Einspurmodell mit Wanken)
- Gravitationskraft
- Die aerodynamischen Kräfte
- Reifenkräfte
------------------------------------------------------------------------------------------------------------
1. vereinfachte Modelle der Fahrzeugquerdynamik
- Das Fahrzeugmodell wird um die wankende Masse erweitert.
- ein körperfestes Koordinatensystem soll verwendet werden.
- Aufbau : wankende Masse , Fahrgestell : nicht wankende Masse
-------------------------------------------------------------------------------------------------------------
- Die Bewegungsgleichungen für die Querdynamik : Kraftbilanz in y Richtung , Momentbilanz um die z-Achse und x-Achse.
-
Untersuchung der Wankdynamik anhand des Einspurmodell
1. http://www.hausarbeiten.de/faecher/vorschau/58491.html#inside
2. Das lineae Einpurmodell mit Wanken
3. Querdynamik des Einspurmodells
4. Bewegungsgleichung des Einspurmodells
5. Kinematische und Kinetische Größen am Einspurmodell
6. Das lineare Einspurmodell mit Wanken
7. Kraftbilanz in y Richtung des Einspurmodell mit Wanken
8. Momentbilanz um x Achse des Einspurmodell mit Wanken
9. Momentbilanz um z Achse des Einspurmodell mit Wanken
2. Das lineae Einpurmodell mit Wanken
3. Querdynamik des Einspurmodells
4. Bewegungsgleichung des Einspurmodells
5. Kinematische und Kinetische Größen am Einspurmodell
6. Das lineare Einspurmodell mit Wanken
7. Kraftbilanz in y Richtung des Einspurmodell mit Wanken
8. Momentbilanz um x Achse des Einspurmodell mit Wanken
9. Momentbilanz um z Achse des Einspurmodell mit Wanken
Sonntag, 30. Januar 2011
Difference between kinetic and kinematic ?
- Difference between kinetic and kinematic ?
- Kinematic is the study of state of motion of a body i.e. includes both restand moving bodies.
- Kinematics is the computation of the velocity and acceleration of a moving body.
- Kinematic deals with aspects of motion apart from considerations of mass and force.
- kinematics is the description of how objects move.
- Kinetic is study of moving bodies only (velocity, acceleration)
- Kinetic relates the motion of bodies and the associated forces and energy.
- Static : Study of forces on rigid body which is stationary.
- Dynamics : Study of forces on rigid body when it's in motion.
- Kinetics : Branch of Dynamics without considering forces causing motion.
- Kinematics: Branch of Dynamics considering the forces causing the motion.
- Kinematik beschreibt die Bewegungen.z.B. " Es gibt beim Rad eine kinematische Beziehung zwischen Rollgeschwindigkeit und Winkelgeschwindigkeit "
- Kinematik ist Lehre vom geometrischen & zeitlichen Ablauf von Bewegungen ohne nach Ursache (Kräfte )& Wirkung zu fragen.
Kinetik ist die Wirkung zwischen Kräften und Massen.
Kinetik beschreibt die Änderung der Bewegungsgröße.
Kinetik steht im Gegensatz zur Statik , Statik ist Lehre vom Gleichgewicht ruhender Körper.
Freitag, 28. Januar 2011
Schwingung
- Schwingung bezeichnet den Verlauf einer Zustandänderung,wenn ein System aus dem stabilen Gewicht der nach einer Störung oder Auslenkung gebracht,und durch eine rücktreibende Kraft wieder gezwungen wird.
- Das Schwingung basiert auf der periodischen Engergieumwandlung zwischen zwei Energieformen.
- Es gibt gedämpfte & ungedämpfte , freie & erzwungene , selbsterregte & parametererregte , lineare & nichtlineare Schwingungen , Schwingungen mit einem Freiheitsgrad , mit endlich vielen Freiheitsgraden, mit unendlich vielen Freiheitsgraden.
- Gedämpfte & ungedämpfte Schwingung :
- freie & erzwungene Schwingung :
- Das Schwingung basiert auf der periodischen Engergieumwandlung zwischen zwei Energieformen.
- Es gibt gedämpfte & ungedämpfte , freie & erzwungene , selbsterregte & parametererregte , lineare & nichtlineare Schwingungen , Schwingungen mit einem Freiheitsgrad , mit endlich vielen Freiheitsgraden, mit unendlich vielen Freiheitsgraden.
- Gedämpfte & ungedämpfte Schwingung :
- die physikalische Systeme sind immer gedämpft ,sie geben immer Energie an die Umgebung ab.
- Wenn man das System sich selbst überlässt,führt das zum Stillstand.
- freie & erzwungene Schwingung :
- Die Frequenz der freien Schwingung ist die Eigenfrequenz des Schwingers.
- Das Erregungsmechanism ist die Weg- ,Kraft- ,Umwuchterregung.
- Die Energiezufuhr wird selbst gesteuert (Oszillator)
- Parametererregte Schwingungen tritt dann auf, wenn sich Parameter des Schwingungssystems periodisch ändern.
- Die Veränderung der Pendallänge beim Schaukeln.
- linear : Bei der Differentialgleichungen sind alle Abhängigkeiten von der schwingenden Größe und ihren zeitlichen Ableitungen linear.
- nichtlinear : mit harmonischer Erregung sind nicht mehr streng sinusförmig,sondern enthalten höhere Harmonische.
Mittwoch, 26. Januar 2011
Bode Diagramm
1. Bode Diagramm besteht aus einem Graph für den Betrag und einem für das Argument einer komplexen Übertragungsfunktion.
Ein Bode-Diagramm beschreibt die stationäre Reaktion an einem Ausgang eines Systems auf eine harmonische Anregung (Sinusschwingung) an einem Eingang des Systems.
2. Das Bode-Diagramm dient der Darstellung der Frequenzantwort eines dynamischen Systems, aber das Nyquist-Diagramm (Frequenzgang-Ortskurve) oder das Pol-Nullstellen-Diagramm dienen die Stabilitätsbetrachtung.
3. Die Verstärkung wird in Dezibel aufgetragen( logarithmische Darstellung)
a. P-Glied
b. D-Glied : 20 dB/Dekade, 0 dB bei ω0
c. I-Glied : −20 dB/Dekade, 0 dB bei ω0
d. PD-Glied : Knick bei ω0, dann +20 dB/Dekade
f. PT1-Glied : Knick bei ω0, dann −20 dB/Dekade
g. PT2-Glied : Knick bei ω0, dann −40 dB/Dekade
-------------------------------------------------------------------------------------------------------------
1. Nyquist-Diagramm stellt die Ortskurve der Ausgangsgröße eines Regelkreises mit der Frequenz als Parameter dar.
2. Um die Stabilität eines Systems mit Rückkopplung zu beschreiben.
http://www.schellinger.de/regelungstechnik/ortskurve/index.html
Ein Bode-Diagramm beschreibt die stationäre Reaktion an einem Ausgang eines Systems auf eine harmonische Anregung (Sinusschwingung) an einem Eingang des Systems.
2. Das Bode-Diagramm dient der Darstellung der Frequenzantwort eines dynamischen Systems, aber das Nyquist-Diagramm (Frequenzgang-Ortskurve) oder das Pol-Nullstellen-Diagramm dienen die Stabilitätsbetrachtung.
3. Die Verstärkung wird in Dezibel aufgetragen( logarithmische Darstellung)
a. P-Glied
b. D-Glied : 20 dB/Dekade, 0 dB bei ω0
c. I-Glied : −20 dB/Dekade, 0 dB bei ω0
d. PD-Glied : Knick bei ω0, dann +20 dB/Dekade
f. PT1-Glied : Knick bei ω0, dann −20 dB/Dekade
g. PT2-Glied : Knick bei ω0, dann −40 dB/Dekade
-------------------------------------------------------------------------------------------------------------
1. Nyquist-Diagramm stellt die Ortskurve der Ausgangsgröße eines Regelkreises mit der Frequenz als Parameter dar.
2. Um die Stabilität eines Systems mit Rückkopplung zu beschreiben.
http://www.schellinger.de/regelungstechnik/ortskurve/index.html
single track model
1. single track model (2 degree-of-freedom linear ) :
A mathematical representation of a vehicle in which small steering and tire slip angles are assumed. In this instance the radius of curvature is assumed to be large and thus the left and right side tires are combined into a single front and single rear tire, like a bicycle. A linear tire is assumed, meaning that the tire slip angle remains small, typically below about three degrees. The two degrees of freedom for this model are lateral velocity and yaw rate
2. single track model (3 degree-of-freedom linear ):
A mathematical representation of a vehicle with the same steering and tire assumptions as the 2 DOF model, but with an additional degree of freedom. the roll angle of the sprung mass was considered.
3. Bicycle Mode : single track model
4. CG : vehicle center of gravity
5. Cα : tire cornering stiffness (N/rad)
6. Cφ : total roll damping (Nms/rad)
7. u : longitudinal velocity (m/s)
8. v ,v' : lateral velocity (m/s) , lateral acceleration (m/s2)
9. αf, r : tire slip angle (rad)
10. δf : front steer angle (rad)
11. φ : roll angle (rad)
12. φ' : roll velocity (rad/s)
13. φ'' : roll acceleration (rad/s2)
A mathematical representation of a vehicle in which small steering and tire slip angles are assumed. In this instance the radius of curvature is assumed to be large and thus the left and right side tires are combined into a single front and single rear tire, like a bicycle. A linear tire is assumed, meaning that the tire slip angle remains small, typically below about three degrees. The two degrees of freedom for this model are lateral velocity and yaw rate
2. single track model (3 degree-of-freedom linear ):
A mathematical representation of a vehicle with the same steering and tire assumptions as the 2 DOF model, but with an additional degree of freedom. the roll angle of the sprung mass was considered.
3. Bicycle Mode : single track model
4. CG : vehicle center of gravity
5. Cα : tire cornering stiffness (N/rad)
6. Cφ : total roll damping (Nms/rad)
7. u : longitudinal velocity (m/s)
8. v ,v' : lateral velocity (m/s) , lateral acceleration (m/s2)
9. αf, r : tire slip angle (rad)
10. δf : front steer angle (rad)
11. φ : roll angle (rad)
12. φ' : roll velocity (rad/s)
13. φ'' : roll acceleration (rad/s2)
ESP : Electronic stability program
VDC : Vehicle Dynamics Control
DSV : Vehicle Stability Control
DVS : Daihatsu Vehicle stability
DSC : Dynamic Stability Control
VSA : Vehicle Stability Control
ASC : Active Stability Control
All of these are only the commercial names of the same Controller (DYC)
the most popular name is "ESP" ,which is used in the following:
Audi , Bentley , Bugatti , Chrysler , Citroën , Dodge , Daimler , Fiat , Holden , Jeep , Lamborghini , Mercedes-Benz , Opel ,Peugeot , Renault , Saab , Scania , SEAT , Škoda , Smart , Suzuki , Vauxhall and Volkswagen.
http://www.projecttrackday.com/
http://www.safercar.gov/Vehicle+Shoppers/Rollover/Electronic+Stability+Control
VDC : Vehicle Dynamics Control
DSV : Vehicle Stability Control
DVS : Daihatsu Vehicle stability
DSC : Dynamic Stability Control
VSA : Vehicle Stability Control
ASC : Active Stability Control
All of these are only the commercial names of the same Controller (DYC)
the most popular name is "ESP" ,which is used in the following:
Audi , Bentley , Bugatti , Chrysler , Citroën , Dodge , Daimler , Fiat , Holden , Jeep , Lamborghini , Mercedes-Benz , Opel ,Peugeot , Renault , Saab , Scania , SEAT , Škoda , Smart , Suzuki , Vauxhall and Volkswagen.
http://www.projecttrackday.com/
http://www.safercar.gov/Vehicle+Shoppers/Rollover/Electronic+Stability+Control
Dienstag, 25. Januar 2011
Areas of interest
1. Aerospace vehicle guidance and controls.
2. Vehicle dynamics and controls.
3. Systems modeling and simulation.
Current Interest :
Active-Passive vehicle control systems and early prediction systems for vehicle rollover.
Past Interest:
A Simulink model for vehicle rollover prediction
http://web.ics.purdue.edu/~chiu2/research/thesis.pdf
Engineering Background :
1. Vehicle Dynamics: Steady state and transient handling models of four-wheeled vehicles and car-trailer systems to determine oversteer and understeer characteristics, critical speeds, and stability.
2. Systems Analysis and Synthesis : Analysis and design of classical control systems (Lead/lag control, Pole placement methods, Frequency response-based design of feedback controllers)
3.
2. Vehicle dynamics and controls.
3. Systems modeling and simulation.
Current Interest :
Active-Passive vehicle control systems and early prediction systems for vehicle rollover.
Past Interest:
A Simulink model for vehicle rollover prediction
http://web.ics.purdue.edu/~chiu2/research/thesis.pdf
Engineering Background :
1. Vehicle Dynamics: Steady state and transient handling models of four-wheeled vehicles and car-trailer systems to determine oversteer and understeer characteristics, critical speeds, and stability.
2. Systems Analysis and Synthesis : Analysis and design of classical control systems (Lead/lag control, Pole placement methods, Frequency response-based design of feedback controllers)
3.
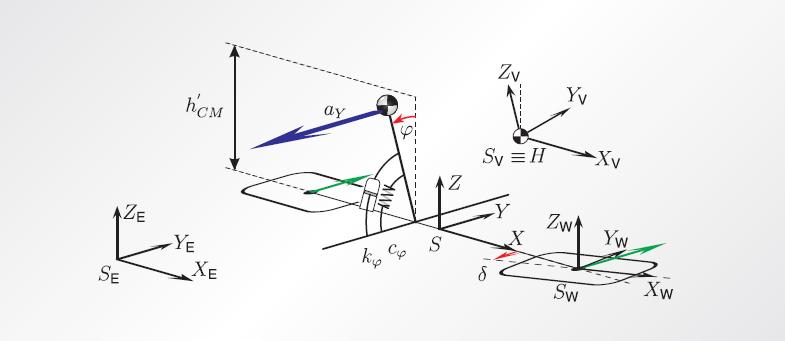
Linear Single-Track (Bicycle) Model
In the Linear Single-Track (Bicycle) model, the vehicle dynamics are captured
by a front and rear tire with a mass CG located longitudinally between both tires
and at a vertical offset from the roll axis. The roll degree of freedom in the x-axis
is measured from the reference ground plane and combined with a roll stiffness and
damper which allows the vehicle body to roll relative to the ground when undergoing
turn maneuvers.
Linear bicycle model with roll degree of freedom
http://web.ics.purdue.edu/~chiu2/research/thesis.pdf
- 2 DOF linear vehicle model.
- This model has lateral and yaw degrees of freedom.
- Global X-Y coordinates for Linear Vehicle.
Bezüglich zum Thema Einsetzung des Fahrmanövers ,um das Koordinatensystem
als Global Koordinatensystem beim Einspurmodell zu beschreiben,habe ich paar
Gedanke gemacht ,aber noch nicht im Simulink umgesetzt,und bearbeite ich momentan mit dem Thema..Falls es ein Material zur Verfügung stehen würde,würde ich mich auch freuen.
Bezüglich zum Thema Wankbewegung im Einspurmodell sollte ich die Zustandsgleichungen erweitern,wobei ein phi ,und phi punkt für die Vorder-und Hinterachse als Ausgänge des Subsystems erfolgen.
Anschließend kann man auch für die Wankbewegung mit dem Lokal Koordination ein regler einsetzen.
Darüber hinaus sind die zerlegte Gleichungen mittelweile geeignet im diesem Fall ist,damit wir zwei Regler einsetzen können.
by a front and rear tire with a mass CG located longitudinally between both tires
and at a vertical offset from the roll axis. The roll degree of freedom in the x-axis
is measured from the reference ground plane and combined with a roll stiffness and
damper which allows the vehicle body to roll relative to the ground when undergoing
turn maneuvers.
Linear bicycle model with roll degree of freedom
http://web.ics.purdue.edu/~chiu2/research/thesis.pdf
- 2 DOF linear vehicle model.
- This model has lateral and yaw degrees of freedom.
- Global X-Y coordinates for Linear Vehicle.
Bezüglich zum Thema Einsetzung des Fahrmanövers ,um das Koordinatensystem
als Global Koordinatensystem beim Einspurmodell zu beschreiben,habe ich paar
Gedanke gemacht ,aber noch nicht im Simulink umgesetzt,und bearbeite ich momentan mit dem Thema..Falls es ein Material zur Verfügung stehen würde,würde ich mich auch freuen.
Bezüglich zum Thema Wankbewegung im Einspurmodell sollte ich die Zustandsgleichungen erweitern,wobei ein phi ,und phi punkt für die Vorder-und Hinterachse als Ausgänge des Subsystems erfolgen.
Anschließend kann man auch für die Wankbewegung mit dem Lokal Koordination ein regler einsetzen.
Darüber hinaus sind die zerlegte Gleichungen mittelweile geeignet im diesem Fall ist,damit wir zwei Regler einsetzen können.
Vehicle Simulation - Matlab Simulink
hi there, i am currently developing a vehicle simulation model using matlab simulink.
The simulation requires a vehicle to be simulated traveling around a simple race track. the vehicle model itself has already been created and have all necessary vehicle input data for the simulation.
Hi, I am dealing with a vehicle dynamics model ,The problem is, I am getting !!!
Need Help In Modeling Longitudinal Vehicle Dynamics
Dear all I am a Master student in Vehicle dynamics and control from Paderborn. To have a basis for my research, i need to develop a longitudinal vehicle model for acceleration considering the tyre slip.
I have all the equations(for wheel dynamics,vehicle dynamics(Fx=m*a)and slip calculation)to develop a model .
The simulation requires a vehicle to be simulated traveling around a simple race track. the vehicle model itself has already been created and have all necessary vehicle input data for the simulation.
Hi, I am dealing with a vehicle dynamics model ,The problem is, I am getting !!!
Need Help In Modeling Longitudinal Vehicle Dynamics
Dear all I am a Master student in Vehicle dynamics and control from Paderborn. To have a basis for my research, i need to develop a longitudinal vehicle model for acceleration considering the tyre slip.
I have all the equations(for wheel dynamics,vehicle dynamics(Fx=m*a)and slip calculation)to develop a model .
extended equations for the extended bicycle model
There are two degrees of freedom for the lateral motion, the lean angle of the rear frame and the
steering angle.
the bicycle model : the linearized equations for the bicycle for the lateral perturbations
Bicycle Model Of Vehicle Motion
http://audiophile.tam.cornell.edu/~als93/Publications/MeijaardSchwab2006.pdf
http://qbx6.ltu.edu/asik/Vehicle_dynamics_tw_dw.htm
Four-Wheel Steering control system:
4WS system operates by steering the rear wheels as a function of the front steer angle.
Modeling and Control of an Autonomous Vehicle.
Vehicle Linear State Model.
http://alexandria.tue.nl/repository/books/626941.pdf
steering angle.
the bicycle model : the linearized equations for the bicycle for the lateral perturbations
Bicycle Model Of Vehicle Motion
http://audiophile.tam.cornell.edu/~als93/Publications/MeijaardSchwab2006.pdf
http://qbx6.ltu.edu/asik/Vehicle_dynamics_tw_dw.htm
Four-Wheel Steering control system:
4WS system operates by steering the rear wheels as a function of the front steer angle.
Modeling and Control of an Autonomous Vehicle.
Vehicle Linear State Model.
http://alexandria.tue.nl/repository/books/626941.pdf
Samstag, 22. Januar 2011
Freiheitsgrad
Der Freiheitsgrad beschreibt die Anzahl & Art der möglichen Bewegungen,die das Gelenk ausführen kann.
Jeder Parameter kann verändert werden, ohne dass sich die anderen Parameter verändern.
Physik:
- Das System kann mit der unabhängigen (verallgemeinerte) Koordinate beschrieben werden.
- Ein Freiheitsgrad ist eine Systemeigenschaft:
- Drehgelenk
- Schraubgelenk
- Kugelgelenk
Jeder Parameter kann verändert werden, ohne dass sich die anderen Parameter verändern.
Physik:
- Das System kann mit der unabhängigen (verallgemeinerte) Koordinate beschrieben werden.
- Ein Freiheitsgrad ist eine Systemeigenschaft:
- Drehgelenk
- Schraubgelenk
- Kugelgelenk
Donnerstag, 20. Januar 2011
Fahrzeugmodelle
1. Einspurmodell : Bei der Herleitung des Einspurmodells wird das komplexe Fahrzeugsystem
durch eine Vereinfachungen auf nur wenige Gleichungen zurückgeführt.
Mit Hilfe dieses Modells lassen sich schnell die Aussagen über die Fahreigenschaften ableiten.
Das Fahrzeug wird auf eine mittlere Spur zusammengefasst, so dass die Achsen jeweils als eine Einheit betrachtet werden.
2. Nichtlineares Einspurmodell : Mit dem nichtlinearen Einspurmodell wird das Fahrzeug als Starrkörper
betrachtet, der sich ausschließlich horizontal bewegen kann.
3. Zweispurmodell : An allen vier Radaufstandspunkten wirken Längs- und Querkräfte, welche die horizontale Bewegung des Gesamtfahrzeugs beeinflussen.
4. Vierradmodell :
5. Mehrkörpersysteme :

Prinzip und Koordinationsysteme des Einspurmodells
http://deposit.d-nb.de/cgi-bin/dokserv?idn=991708091&dok_var=d1&dok_ext=pdf&filename=9917080901.pdf
durch eine Vereinfachungen auf nur wenige Gleichungen zurückgeführt.
Mit Hilfe dieses Modells lassen sich schnell die Aussagen über die Fahreigenschaften ableiten.
Das Fahrzeug wird auf eine mittlere Spur zusammengefasst, so dass die Achsen jeweils als eine Einheit betrachtet werden.
2. Nichtlineares Einspurmodell : Mit dem nichtlinearen Einspurmodell wird das Fahrzeug als Starrkörper
betrachtet, der sich ausschließlich horizontal bewegen kann.
3. Zweispurmodell : An allen vier Radaufstandspunkten wirken Längs- und Querkräfte, welche die horizontale Bewegung des Gesamtfahrzeugs beeinflussen.
4. Vierradmodell :
5. Mehrkörpersysteme :
Prinzip und Koordinationsysteme des Einspurmodells
http://deposit.d-nb.de/cgi-bin/dokserv?idn=991708091&dok_var=d1&dok_ext=pdf&filename=9917080901.pdf
Das vereinfachte Modell zur Beschreibung der Wankbewegung beschreibt die reale Bewegung nur dann ausreichend genau ,wenn die wirkende Querbeschleunigung einen Grenzwert von etwa 4 m/s² nicht überschreitet.
Die Eigenfrequenz der Wankbewegung liegt je nach Beladung des Fahrzeugs zwischen 8-11 Hz.
Wenn alle genannten Effekte in der Modellbildung der Wankbewegung berücksichtigt werden,müsste die Beschreibung aller Details des Fahrwerks beinhalten.
Um die dynamische Wankbewegung des Fahrzeugs über den stabilen Bereich der Fahrdynamik hinweg abbilden zu können.
Zur Abbildung der Wankdynamik des Fahrzeugs wurde dieses Modell eingesetzt.
Die Wankwinkel und die Lenkwinkel der Vorder- Hinterräder werden als klein angenommen.
Die Trägheitskraft senkrecht zur Bewegungsgleichung wird als äußere Kraft im Schwerpunkt des Aufbaus angenommen.
Beim linearen Wankmodell werden Vorder- und Hinterachse zu einer Achse zusammengefasst.
Der Wankwinkel ist von der Querbeschleunigung abhängig.
Die Kräfte sind vorne & hinten zusammengefasst.
- Entstehung des Wankmoments beim Auslenken.
- Aktive Wankstabilisierung
-
In der Fahrwerkentwicklung liegt ein Schwerpunkt
Das Ziel wird verfolgt, um das Abstimmprozess zu begleiten.
Das Systemverständnis wird erhöht & der Aufwand der Abstimmung im Fahrzeug reduziert.
- Ich kann mein Fahrzeug- und Systemmodellierungsverständnis vertiefen.
- Einarbeitung der Literatur zur Fahrzeugmodellierung.
- Entwurf von Wankmodellen mit Berücksichtigung unterschiedlicher Modellierungstiefen.
In PKW werden fahrdynamische Reglersysteme eingesetzt,um dem Anspuch des Kunden nach Komfort ,Fahrsicherheit zu tragen.
Diese beeinflussen das Fahrzeug in längs-,quer- und vertikaldynamischer Richtung
Wankdynamik :
Wanken entsteht auf Grund von Krafteinwirkung am Schwerpunkt in Form von Querbeschleunigung (Fahrerinduziertes Wanken)
Wanken entsteht auf Grund von aerodynamischen Kräften mit der Komponente in y Richtung (aerodynamisches Wanken)
Querregler
Der Skyhook Regler sorgt für die Bedämpfung der Freiheitsgrade des Fahrzeugs Huben,Nicken und Wanken.
Die Querbeschleunigung wird mittels der Eingangssignale(Fahrgeschwindigkeit,Lenkwinkel,Querbeschleunigung,Gierrate) über ein Einspurmodell ermittelt
Das Wankmoment muss allerdings aufbereitet werden.
Fahrphysik : Längs-, Quer- und Vertikaldynamik
Fahrzeugmodelle: Fahrradmodell, Zweispurmodell, Viertelfahrzeugmodell, Wankmodell, Nickmodell
Wankverhalten (Roll Dynamics)
Fahrzeugquerdynamik
Modell der Wankdynamik
- Die Wirkung der 4 Luftfedern wird in den betrachteten Bewegungsrichtungen abstrahiert.
- Zwischen Fahrwerk & Aufbau wirken die Kräfte bzw. Momente von 3 Feder-Dämpferelementen.
- Eine Kraft in Querrichtung & ein Moment um die Längsachse & eine Moment um die Hochachse.
- Die Kräfte von Feder-/Dämpferelementen in Querrichtung wirken zwischen dem Fahrwerk und den Achsen.
- Die Berücksichtigung der Lenkwinkelrate : Die Dynamik der Lenkwinkelregelung kann durch die Vorsteuerung der Lenkwinkelrate verbessert werden.
- Die Lenkwinkel folgen mit perfektem I-Verhalten.
-Das lineare Modell des Fahrzeugs besteht aus 4 Starrkörpern,die mit Feder-/Dämpferelementen gekoppelt werden.
- Zwischen Fahrwerk & Aufbau wirken die Kräfte bzw. Momente von 3 Feder-Dämpferelementen.
- Eine Kraft in Querrichtung & ein Moment um die Längsachse & eine Moment um die Hochachse.
- Die Kräfte von Feder-/Dämpferelementen in Querrichtung wirken zwischen dem Fahrwerk und den Achsen.
- Die Berücksichtigung der Lenkwinkelrate : Die Dynamik der Lenkwinkelregelung kann durch die Vorsteuerung der Lenkwinkelrate verbessert werden.
- Die Lenkwinkel folgen mit perfektem I-Verhalten.
-Das lineare Modell des Fahrzeugs besteht aus 4 Starrkörpern,die mit Feder-/Dämpferelementen gekoppelt werden.
Mittwoch, 19. Januar 2011
XML-basierte Fahrmanövern
Fahrmanövevrn: Spurwechsel , Überholvorgang , Kurvenfahrt
Fahrszenarienbeschreibung
Während des Fahrmanövers
auf der schneeglatten Fahrbahn ins Rutschen.
Fahrszenarienbeschreibung
Während des Fahrmanövers
auf der schneeglatten Fahrbahn ins Rutschen.
Montag, 17. Januar 2011
Matlab und Simulink in der Ingenierpraxis
- Simulink-Modellierung eines einfachten Projekts
- Viertel Fahrzeugmodell und die Bewegungsgleichungen
- Fahrzeugmodell auf unebener Fahrbahn (Die Anregung durch die Rampenauffahrt)
- Fahrzeugmodell ohne Reibelement & Fahrzeugmodell mit Reibelement
- Das Fahrbahnprofil : Modellierung der Fahrbahnunebenheit (Fahrbahnmodellierung)
- Modellierung der ebenen Fahrbahnstruktur
- Modellierung mit einem Function-Block
- Das reibungsfreie Modell
- Viertel Fahrzeugmodell und die Bewegungsgleichungen
- Fahrzeugmodell auf unebener Fahrbahn (Die Anregung durch die Rampenauffahrt)
- Fahrzeugmodell ohne Reibelement & Fahrzeugmodell mit Reibelement
- Das Fahrbahnprofil : Modellierung der Fahrbahnunebenheit (Fahrbahnmodellierung)
- Modellierung der ebenen Fahrbahnstruktur
- Modellierung mit einem Function-Block
- Das reibungsfreie Modell
Sonntag, 16. Januar 2011
Advanced Course in Control Systems
http://www.tuat.ac.jp/~pong/
- vehicle dynamics,the control applications for enhancing vehicle dynamics and active safety.
- active control devices in automobiles : four-wheel-steering, direct yaw moment control, Adaptive Cruise Control(ACC), Lane Keeping System.
- mechanism of active vehicle control device, compute the vehicle responses.
- References : Vehicle Handling Dynamics, Theory and Application ,Modern Control Systems
- Two-wheel vehicle model
- Four-wheel-steering control system
- Direct yaw moment control system
- State Observer, Kalman Filtering
- Vehicle Chassis Control(Planar motion)
- Yaw motion , Sideslip motion
1. Active Rear Steer (sideslip motion control)
2. Direct Yaw Control(sideslip motion control)
3. Active Front Steer (yaw rate control)
- Equivalent Bicycle Model (Bicycle Model)
- vehicle dynamics,the control applications for enhancing vehicle dynamics and active safety.
- active control devices in automobiles : four-wheel-steering, direct yaw moment control, Adaptive Cruise Control(ACC), Lane Keeping System.
- mechanism of active vehicle control device, compute the vehicle responses.
- References : Vehicle Handling Dynamics, Theory and Application ,Modern Control Systems
- Two-wheel vehicle model
- Four-wheel-steering control system
- Direct yaw moment control system
- State Observer, Kalman Filtering
- Vehicle Chassis Control(Planar motion)
- Yaw motion , Sideslip motion
1. Active Rear Steer (sideslip motion control)
2. Direct Yaw Control(sideslip motion control)
3. Active Front Steer (yaw rate control)
- Equivalent Bicycle Model (Bicycle Model)
Simulink Model Links
Helicopter 2 DOF Dspace + Virtual reality
http://personal.mecheng.adelaide.edu.au/~bscazz/Quanser/
Different Simdemo
Dynamics
http://www.ligo-wa.caltech.edu/~cheryl.vorvick/etmx2007/OldStuffFromPCLaptop/MATLAB6p1/toolbox/simulink/simdemos/simgeneral/
Automotive
http://www.ligo-wa.caltech.edu/~cheryl.vorvick/etmx2007/OldStuffFromPCLaptop/MATLAB6p1/toolbox/simulink/simdemos/automotive/
http://personal.mecheng.adelaide.edu.au/~bscazz/Quanser/
Different Simdemo
Dynamics
http://www.ligo-wa.caltech.edu/~cheryl.vorvick/etmx2007/OldStuffFromPCLaptop/MATLAB6p1/toolbox/simulink/simdemos/simgeneral/
Automotive
http://www.ligo-wa.caltech.edu/~cheryl.vorvick/etmx2007/OldStuffFromPCLaptop/MATLAB6p1/toolbox/simulink/simdemos/automotive/
Samstag, 15. Januar 2011
Vehicle Dynamics Fahrzeugdynamik
http://homepages.fh-regensburg.de/~rig39165/skripte/Vehicle_Dynamics.pdf
- Lateral dynamics
- Kinematic approach
- Ackermann Geometry
- side-slip angle / slip angle
- electronic stability control - steer by wire
- Vertical Dynamics
- Basic tuning
- Sky hook damper
- nonlinear force element
- Longitudinal Dynamics
- Lateral dynamics
- Kinematic approach
- Ackermann Geometry
- side-slip angle / slip angle
- electronic stability control - steer by wire
- Vertical Dynamics
- Basic tuning
- Sky hook damper
- nonlinear force element
- Longitudinal Dynamics
Vehicle dynamic model analysis
- Vehicle yaw rate & the side slip angle of the front at the step steering.
- Vehicle Lateral and Yaw Motion Control
- Lateral vehicle control by Yaw rate feedback
- Vehicle lateral velocity and yaw rate control
- EPS Control based on feedback of yaw rate and lateral acceleration
- Lateral Control by Yaw Rate Feedback
- 4 wheel steering vehicle
- Direct yaw moment control (DYC)
- Active front steering (AFS)
- Electrical stability program(ESP)
- Front view of the vehicle
- Top view of the vehicle
- vehicle tracking using a single track model
- the study of lateral dynamics
- Single track model by Rickert & Schunck (slideslip angle and the yaw rate)
- Interaction of Longitudinal and Lateral Dynamics
http://www.vehicledynamics-expo.com/07vdx_conf/day_3/de_cuyper.pdf
- Vehicle Lateral and Yaw Motion Control
- Lateral vehicle control by Yaw rate feedback
- Vehicle lateral velocity and yaw rate control
- EPS Control based on feedback of yaw rate and lateral acceleration
- Lateral Control by Yaw Rate Feedback
- 4 wheel steering vehicle
- Direct yaw moment control (DYC)
- Active front steering (AFS)
- Electrical stability program(ESP)
- Front view of the vehicle
- Top view of the vehicle
- vehicle tracking using a single track model
- the study of lateral dynamics
- Single track model by Rickert & Schunck (slideslip angle and the yaw rate)
- Interaction of Longitudinal and Lateral Dynamics
http://www.vehicledynamics-expo.com/07vdx_conf/day_3/de_cuyper.pdf
Freitag, 14. Januar 2011
Vehicle Lateral dynamics
the Driver assisted systems: DSC(Dynamic Stability Control),ESP (Electronic Stabilization Program),TCS
(Traction Control System)
the vehicle lateral dynamics model with two degrees of freedom, lateral and yaw motions
Bicycle model
mohammed.oudghiri@u-picardie.fr
mohammed.chadli@u-picardie.fr
ahmed.hajjaji@u-picardie.fr
(Traction Control System)
the vehicle lateral dynamics model with two degrees of freedom, lateral and yaw motions
Bicycle model
mohammed.oudghiri@u-picardie.fr
mohammed.chadli@u-picardie.fr
ahmed.hajjaji@u-picardie.fr
Zweispurmodell
Das nichtlineare Zweispurmodell dient im Gegensatz zum linearen Einspurmodell .
A nonlinear double-track model is in contract to the single track model.
A nonlinear double-track model is in contract to the single track model.
Lateral Dynamics of the RailCab Vehicle
- the single-track model is a standard for modeling the vehicle lateral dynamics
- Rail-bound vehicle with two steerable axles
- linear model of 4th order
- http://www.nt.ntnu.no/users/skoge/prost/proceedings/ifac2008/data/papers/2350.pdf
- http://www.rst.e-technik.uni-dortmund.de/cms/Medienpool/Downloads/Veranstaltungen/Dortmunder_Regelungstechnische_Kolloquien/2007/Vortrag_2007-06-26-Hass.pdf
- Rail-bound vehicle with two steerable axles
- linear model of 4th order
- http://www.nt.ntnu.no/users/skoge/prost/proceedings/ifac2008/data/papers/2350.pdf
- http://www.rst.e-technik.uni-dortmund.de/cms/Medienpool/Downloads/Veranstaltungen/Dortmunder_Regelungstechnische_Kolloquien/2007/Vortrag_2007-06-26-Hass.pdf
Mittwoch, 12. Januar 2011
Lineares Einspurmodell & Einfaches Einspurmodell
Fahrdynamikregelung ESP
- Kräftegleichgewicht in Fahrzeuglängsrichtung
- Kräftegleichgewicht senkrecht zur Fahrzeuglängsrichtung
- Momentengleichgewicht um SP
- Krümmungsmittelpunkt
-
http://www.systemdynamics.org/conferences/2009/proceed/supp/
Robust car steering by yaw rate feedback.
Automatische Spurführung von Kraftfahrzeugen.
Automatic Steering Control of Vehicle Lateral Motion with the Effect of Roll Dynamics.
- Kräftegleichgewicht in Fahrzeuglängsrichtung
- Kräftegleichgewicht senkrecht zur Fahrzeuglängsrichtung
- Momentengleichgewicht um SP
- Krümmungsmittelpunkt
-
http://www.systemdynamics.org/conferences/2009/proceed/supp/
Robust car steering by yaw rate feedback.
Automatische Spurführung von Kraftfahrzeugen.
Automatic Steering Control of Vehicle Lateral Motion with the Effect of Roll Dynamics.
Matlab/Simulink an Beispielen aus der Fahrzeugdynamik
Matlab-simulink using the example of vehicle dynamic models
Matlab-simulink an Beispielen aus der Fahrzeugdynamik
Ich bin in der Lage auf fahrzeugdynamische Problemstellungen anzuwenden.
Simulink : Anwendung in der Fahrzeugdynamik
Erstellen von einfachen Modellen aus der Längs-, Quer- und Vertikaldynamik
Einspurmodell , Zweimassenschwinger
Vertikaldynamik : Viertelfahrzeugmodell, Darstellung einfacher ein- bis dreidimensionaler Fahrzeugmodelle,
Einfluß der Fahrzeugparameter auf Komfort und Fahrsicherheit,Unterschiedliche Anregungsarten.
Längsdynamik : Bremsen, Treiben, Fahrwiderstände,Tangentialkraftdiagramm
Querdynamik : Einspurmodell
Längsdynamik, Querdynamik , Vertikaldynamik von Fahrzeugen
http://deposit.d-nb.de/cgi-bin/dokserv?idn=991708091&dok_var=d1&dok_ext=pdf&filename=991708091.pdf
Matlab-simulink an Beispielen aus der Fahrzeugdynamik
Ich bin in der Lage auf fahrzeugdynamische Problemstellungen anzuwenden.
Simulink : Anwendung in der Fahrzeugdynamik
Erstellen von einfachen Modellen aus der Längs-, Quer- und Vertikaldynamik
Einspurmodell , Zweimassenschwinger
Vertikaldynamik : Viertelfahrzeugmodell, Darstellung einfacher ein- bis dreidimensionaler Fahrzeugmodelle,
Einfluß der Fahrzeugparameter auf Komfort und Fahrsicherheit,Unterschiedliche Anregungsarten.
Längsdynamik : Bremsen, Treiben, Fahrwiderstände,Tangentialkraftdiagramm
Querdynamik : Einspurmodell
Längsdynamik, Querdynamik , Vertikaldynamik von Fahrzeugen
http://deposit.d-nb.de/cgi-bin/dokserv?idn=991708091&dok_var=d1&dok_ext=pdf&filename=991708091.pdf
Dienstag, 11. Januar 2011
vehicle Dynamics
http://www-inst.eecs.berkeley.edu/~ee192/sp10/
MDL
PPT
http://cnx.org/content/m22943/latest/
http://www.engr.panam.edu/~kypuros/VehicleSystems/
http://www.engr.panam.edu/~kypuros/VehicleSystems/BernabeRodriguezProject4.128.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/Bode_plot_notes.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/CRUISECONTROL.128.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/HalfCarSuspensionModelReport.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/INFINITYCRUISECONTROLFINAL.128.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/LarizaNavaroHalfCar.128.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/MotorcycleSuspensionNotes.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/MotorcycleSuspensionReport.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/OrlandoSaenzProject-4.128.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/PepitoMotorcycleReprot.128.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/Project2_Report.128.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/Project2_Report.128.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/Project2_Report.128.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/Report_2A_AL.128.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/VSMC_VehicleDriveModel_Report.128.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/VehicleDriveModelPartAReport.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/VehicleDriveModelPartBReport.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/VehicleSuspensionModelingNotes.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/VehicleSystemsModelingSyllabus.pdf
MDL
PPT
http://cnx.org/content/m22943/latest/
Vehicles Systems Modeling and Control
http://www.engr.panam.edu/~kypuros/VehicleSystems/VehicleSystems.htmlhttp://www.engr.panam.edu/~kypuros/VehicleSystems/
http://www.engr.panam.edu/~kypuros/VehicleSystems/BernabeRodriguezProject4.128.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/Bode_plot_notes.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/CRUISECONTROL.128.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/HalfCarSuspensionModelReport.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/INFINITYCRUISECONTROLFINAL.128.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/LarizaNavaroHalfCar.128.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/MotorcycleSuspensionNotes.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/MotorcycleSuspensionReport.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/OrlandoSaenzProject-4.128.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/PepitoMotorcycleReprot.128.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/Project2_Report.128.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/Project2_Report.128.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/Project2_Report.128.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/Report_2A_AL.128.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/VSMC_VehicleDriveModel_Report.128.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/VehicleDriveModelPartAReport.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/VehicleDriveModelPartBReport.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/VehicleSuspensionModelingNotes.pdf
http://www.engr.panam.edu/~kypuros/VehicleSystems/VehicleSystemsModelingSyllabus.pdf
Single track vehicle model
http://www.tut.fi/plastics/tyreschool/moduulit/moduuli_10/hypertext/5/5_1.html#5_1_37
http://www.tut.fi/plastics/tyreschool/moduulit/moduuli_10/hypertext/6/6_1.html
Single Track vehicle Model
http://www.racing-car-technology.com.au/Vehicle%20Handling%20and%20Control/RCT%20Vehicle%20Handling%20and%20Control%20Intro2.ppt
http://www.tut.fi/plastics/tyreschool/moduulit/moduuli_10/hypertext/6/6_1.html
Single Track vehicle Model
http://www.racing-car-technology.com.au/Vehicle%20Handling%20and%20Control/RCT%20Vehicle%20Handling%20and%20Control%20Intro2.ppt
Modellbildung Bücher
Matlab&Simulink in der Ingenieurpraxis
http://www.viewegteubner.de/Privatkunden/Zusatzmaterial/978-3-8351-0100-5/MATLAB-und-Simulink-in-der-Ingenieurpraxis.html
- Schienenfahrzeugdynamik.
- Matlab-Simulink: Analyse und Simulation dynamischer Systeme.
- Mechatronische Systeme : Grundlagen.
- Einstieg in die Regelungstechnik: Vorgehensmodell für den praktischen Regelerentwurf.
- Kraftfahrzeugführung: Modelle,simulation und Regelung
- Kraftfahrzeugführung
- Grundlagen der Kraftfahrzeugtechnik
- Fahrdynamik-Regelung (Modellbildung,Fahrassistanzsysteme,Mechatronik)
http://www.viewegteubner.de/Privatkunden/Zusatzmaterial/978-3-8351-0100-5/MATLAB-und-Simulink-in-der-Ingenieurpraxis.html
- Schienenfahrzeugdynamik.
- Matlab-Simulink: Analyse und Simulation dynamischer Systeme.
- Mechatronische Systeme : Grundlagen.
- Einstieg in die Regelungstechnik: Vorgehensmodell für den praktischen Regelerentwurf.
- Kraftfahrzeugführung: Modelle,simulation und Regelung
- Kraftfahrzeugführung
- Grundlagen der Kraftfahrzeugtechnik
- Fahrdynamik-Regelung (Modellbildung,Fahrassistanzsysteme,Mechatronik)
Herleitung der Zustandsgleichung für das Einspurmodell
Uni -Duisburg
http://www.uni-due.de/imperia/md/content/mechatronik/lehre/fahrdynamik_kap2_zusatz.pdf
Einspur-Fahrzeugmodell:
http://home.fhtw-berlin.de/~stedtnit/pdf/Diplomarbeit%20Sentuerk.pdf
Fahrwerk:
http://www.mmew.fh-giessen.de/personen/professoren/herzog/download/documents/Kfz-Technik/Kfz_Technik_3_Fahrwerke.pdf
http://www.uni-due.de/imperia/md/content/mechatronik/lehre/fahrdynamik_kap2_zusatz.pdf
Einspur-Fahrzeugmodell:
http://home.fhtw-berlin.de/~stedtnit/pdf/Diplomarbeit%20Sentuerk.pdf
Fahrwerk:
http://www.mmew.fh-giessen.de/personen/professoren/herzog/download/documents/Kfz-Technik/Kfz_Technik_3_Fahrwerke.pdf
Fahrzeugmodell
http://hoppecorp.de/FHTW/Skript_FZT_Teil1.pdf
http://hoppecorp.de/FHTW/Skript_FZT_Teil2.pdf
http://hoppecorp.de/FHTW/Skript_FZT_Teil3.pdf
http://hoppecorp.de/FHTW/Skript_FZT_Teil4.pdf
http://hoppecorp.de/FHTW/Skript_FZT_Teil5.pdf
http://hoppecorp.de/FHTW/Skript_FZT_Teil6.pdf
http://hoppecorp.de/FHTW/Skript_FZT_Teil7.pdf
http://hoppecorp.de/FHTW/Skript_FZT_Teil8.pdf
- Herleitung der Zustandsgleichungen für das Fahrzeug
- Zustandsgleichungen für das Einspurmodell
http://www.biblio.tu-bs.de/ediss/data/20020627b/20020627b.pdf
Einspurmodell - Zweispurmodell - Mehrkörpersystemmodell
http://www.rst.e-technik.uni-dortmund.de/cms/Medienpool/Downloads/Veranstaltungen/Dortmunder_Regelungstechnische_Kolloquien/2007/Vortrag_2007-06-26-Hass.pdf
Funktionsentwicklung
http://134.130.21.215/pdf_eb/gb1-08funktionsentwicklung.pdf
Stabilisierung des rückwärtsfahrenden LKW
http://www.ifr.ing.tu-bs.de/lehre/downloads/skripte/rtp1_lkw_student.pdf
http://hoppecorp.de/FHTW/Skript_FZT_Teil2.pdf
http://hoppecorp.de/FHTW/Skript_FZT_Teil3.pdf
http://hoppecorp.de/FHTW/Skript_FZT_Teil4.pdf
http://hoppecorp.de/FHTW/Skript_FZT_Teil5.pdf
http://hoppecorp.de/FHTW/Skript_FZT_Teil6.pdf
http://hoppecorp.de/FHTW/Skript_FZT_Teil7.pdf
http://hoppecorp.de/FHTW/Skript_FZT_Teil8.pdf
- Herleitung der Zustandsgleichungen für das Fahrzeug
- Zustandsgleichungen für das Einspurmodell
http://www.biblio.tu-bs.de/ediss/data/20020627b/20020627b.pdf
Einspurmodell - Zweispurmodell - Mehrkörpersystemmodell
http://www.rst.e-technik.uni-dortmund.de/cms/Medienpool/Downloads/Veranstaltungen/Dortmunder_Regelungstechnische_Kolloquien/2007/Vortrag_2007-06-26-Hass.pdf
Funktionsentwicklung
http://134.130.21.215/pdf_eb/gb1-08funktionsentwicklung.pdf
Stabilisierung des rückwärtsfahrenden LKW
http://www.ifr.ing.tu-bs.de/lehre/downloads/skripte/rtp1_lkw_student.pdf
Fahrzeugmodell
Einspurmodell : Translation in X-Y Richtung , Gieren
Einspurmodell mit Wankmodell und Nickmodell : Translation in X-Y Richtung , Gieren , Wanken-Nicken
Ebenes Zweispurmodell : Translation in X-Y Richtung , Gieren , Drehen der Räder
Räumliches Zweispurmodell : Translation in X-Y-Z Richtung, Gieren ,Wanken,Drehen der Räder, Hubbewegung der Räder, Lenkbewegung der Vorderachse
Mehrkörpermodell mit Antriebstrang : Translation in X-Y-Z Richtung , Nicken,Gieren,Wanken,Drehen der Räder,Räumliches Einfedern der Räder,Lenkbewegung der Vorderachse , Hebebewegung des Motors,Wankwinkel des Motors, Drehwinkel, Kurbelswelle,Antriebwelle
Einspurmodell mit Wankmodell und Nickmodell : Translation in X-Y Richtung , Gieren , Wanken-Nicken
Ebenes Zweispurmodell : Translation in X-Y Richtung , Gieren , Drehen der Räder
Räumliches Zweispurmodell : Translation in X-Y-Z Richtung, Gieren ,Wanken,Drehen der Räder, Hubbewegung der Räder, Lenkbewegung der Vorderachse
Mehrkörpermodell mit Antriebstrang : Translation in X-Y-Z Richtung , Nicken,Gieren,Wanken,Drehen der Räder,Räumliches Einfedern der Räder,Lenkbewegung der Vorderachse , Hebebewegung des Motors,Wankwinkel des Motors, Drehwinkel, Kurbelswelle,Antriebwelle
Abonnieren
Kommentare (Atom)